
Abstract
The present work quantifies the fuel consumption of a space vehicle in bi-impulsive interplanetary trajectories with an intermediary swing-by maneuver with the Moon. In this way, an interplanetary patched-conic approximation with a lunar swing-by maneuver is formulated with an important characteristic: the swing-by maneuver is designed before the determination of the trajectory by specifying its geometry. The transfer problem is then solved by a multi-point boundary value problem (MPBVP) with two constraints. The intermediary constraint is related to the geometry of the swing-by maneuver with the Moon, and the terminal constraint is related to the altitude of the arrival at the low orbit around the target planet. The proposed algorithm is built in such way that the MPBVP is split into two-point boundary value problems (TPBVPs): the first one is solved to ensure the satisfying of the intermediary constraint, and the second TPBVP is solved next to satisfy the final constraint. Both TPBVPs are solved by means of Newton–Raphson algorithm. The proposed algorithm is then utilized to determine the Earth–Mars and Earth–Venus trajectories with several geometric configurations. The geometric configuration with the smallest fuel consumption is obtained for both missions and compared to an interplanetary patched-conic approximation without swing-by maneuver with Moon. The results show advantages in performing swing-by maneuver with the Moon for interplanetary missions by saving fuel consumption without much increase of the time of flight.












Similar content being viewed by others
References
Arthur Gagg Filho L, Da Silva Fernandes S (2016) Optimal round trip lunar missions based on the patched-conic approximation. Comput Appl Math 35:753–787. https://doi.org/10.1007/s40314-015-0247-y
Bate RR, Mueller DD, White JE (1971) Fundamentals of astrodynamics. Courier Dover Publications, USA
Breakwell JV, Speyer JL, Bryson AE (1963) Optimization and control of nonlinear systems using the second variation. J Soc Ind Appl Math Ser A Control 1:193–223. https://doi.org/10.1137/0301011
Broucke R (1988) The celestial mechanics of gravity assist, 1988 [C]. In: AIAA/AAS astrodynamics conference. American Institute of Aeronautics and Astronautics, Minneapolis pp 69–78
Bryson AE, Denham WF (1962) A Steepest-ascent method for solving optimum programming problems. J Appl Mech 29:247–257
Curtis HD (2005) Orbital Mechanics for Engineering Students. Elsevier Butterworth-Heinemann, Oxford
D’amario LA, Byrnes DV, Stanford RH (1982) Interplanetary trajectory optimization with application to Galileo. J Guid Control Dyn 5:465–471. https://doi.org/10.2514/3.56194
Da Silva Fernandes S, Golfetto WA (2005) Numerical computation of optimal low-thrust limited-power trajectories—transfers between coplanar circular orbits. J Braz Soc Mech Sci Eng 27:178–185
Da Silva Fernandes S, Silveira Filho CR, Golfetto WA (2012) A numerical study of low-thrust limited power trajectories between coplanar circular orbits in an inverse-square force field. Math Probl Eng 2012:168632
Flandro GA (1966) Fast reconnaissance missions to the outer solar system utilizing energy derived from the gravitational field of Jupiter1. Acta Astronaut 12:329–337
Fletcher R, Reeves CM (1964) Function minimization by conjugate gradients. Comput J 7:149–154
Jones DR (2016a) Trajectories for Europa flyby sample return. In: AIAA/AAS astrodynamics specialist conference. AIAA SPACE Forum. American Institute of Aeronautics and Astronautics. https://doi.org/10.2514/6.2016-5265
Jones DR (2016b) Trajectories for Europa flyby sample return. American Institute of Aeronautics and Astronautics
Jones DR (2016c) Trajectories for Flyby Sample Return at Saturn’s Moons. In: AIAA/AAS Astrodynamics Specialist Conference. AIAA SPACE Forum. American Institute of Aeronautics and Astronautics. https://doi.org/10.2514/6.2016-5266
Kelley HJ (1960) Gradient theory of optimal flight paths. ARS J 30:947–954. https://doi.org/10.2514/8.5282
Kenneth P, Mcgill R (1964) Solution of variational problems by means of a generalized Newton–Raphson operator. AIAA J 2:1761–1766
Lasdon L, Mitter S, Waren A (1967) The conjugate gradient method for optimal control problems. IEEE Trans Autom Control 12:132–138
Longmuir AG, Bohn EV (1969) Second-variation methods in dynamic optimization. J Optim Theory Appl 3:164–173
Marec J-P (1979) Optimal space trajectories. Elsevier, Amsterdam
Miele A, Huang HY, Heideman JC (1969) Sequential gradient-restoration algorithm for the minimization of constrained functions–ordinary and conjugate gradient versions. J Optim Theory Appl 4:213–243
Miele A, Wang T (1999) Optimal transfers from an Earth orbit to a Mars orbit. Acta Astronaut 45:119–133
Prado AFBDA (2007) A comparison of the “patched-conics approach” and the restricted problem for swing-bys. Adv Space Res 40:113–117
Pu CL, Edelbaum TN (1975) Four-body trajectory optimization. AIAA J 13:333–336. https://doi.org/10.2514/3.49700
Tang S, Conway BA (1995) Optimization of low-thrust interplanetary trajectories using collocation and nonlinear programming. J Guid Control Dyn 18:599–604. https://doi.org/10.2514/3.21429
Acknowledgements
This research is supported by Grant 2012/25308-5, São Paulo Research Foundation (FAPESP), and by CNPq under contract 304913/2013-8.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Elbert Macau, Antônio Fernando Bertachini de Almeida Prado and Othon Cabo Winter.
Appendix
Appendix
This Appendix details the mathematical formulation of the interplanetary patched-conic approximation with an intermediary lunar swing-by maneuver. The complete trajectory is composed of five phases: a first geocentric phase, a selenocentric phase, a second geocentric phase, a heliocentric phase, and a planetocentric phase.
1.1 First geocentric phase
The mathematical formulation of the geocentric phase is based on the one described by Arthur Gagg Filho and Da Silva Fernandes (2016). For a given a value of the variables \(r_0 \), \(v_0 \) and \(\phi _0 \) at the initial time \(t=t_0\) , after the application of the first impulse, the energy \(\varepsilon _{g,1} \), the angular momentum \(h_{g,1} \), the semi-major axis \(a_{g,1} \), the eccentricity \(e_{g,1} \), and the semilatus rectum \(p_{g,1} \) can be determined as follows:
where
The subscript g, 1 indicates the first geocentric phase and \({\mu _\mathrm{E}} \) is the gravitational parameter of the Earth. Note that the flight path angle \(\phi _0 =0^{\circ }\) at the departure from LEO, as mentioned before.
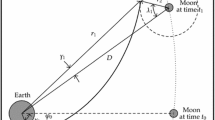
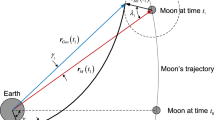
From geometry of Fig. 1, the distance \(r_{g,1} (t_1 )\) of the space vehicle to Earth at the moment \(t=t_1 \), when the geocentric trajectory intercepts the Moon’s sphere of influence (point 1), is given by
where D is the Earth–Moon mean distance, and the distance \(r_s (t_1 )\) is equal to radius \(R_{SM} \) of the Moon’s sphere of influence. The subscript s indicates the selenocentric phase. The phase angle \(\gamma _1 \) (Fig. 1) can also be determined:
The magnitude \(v_{g,1} (t_1 )\) of velocity vector and the flight path angle \(\phi _{g,1} (t_1 )\) are obtained as
The time of flight \(\Delta t_{g,1} \) of the first geocentric trajectory is given by:
with the hyperbolic eccentric anomaly \(H_{g,1} (t_1 )\) obtained from the equation:
The initial phase angle \(\theta _{EP} (0)\) between the space vehicle and the Moon (Fig. 1) at the initial time is given by:
where \(\omega _M \) is the angular velocity of the Moon around the Earth; \(f_0 \) is the true anomaly at \(t=t_0 \), and its value is equal to 0\(^{\circ }\) (the insertion point is the perigee of the geocentric trajectory); and \(f_{g,1} (t_1 )\) is the true anomaly of the space vehicle at \(t=t_1 \),
1.2 Selenocentric phase
The selenocentric phase, characterized by a hyperbolic trajectory, defines the motion of the space vehicle during the swing-by maneuver. At point 1,
where \(\mathbf{v}_M (t_1 )\) is the velocity vector of the Moon relative to the Earth. From Eq. (A.15), one finds the magnitude \(v_s (t_1 )\) of the velocity vector and the flight path angle \(\phi _{g,1} (t_1 )\) as follows:
where \(v_M =\omega _M D\) is the velocity of the Moon around the Earth. The upper and the lower signal in Eq. (A.17) correspond, respectively, to a trajectory in the clockwise sense and in the counterclockwise sense. The angle \(\phi _s (t_1 )\) in the above equation is taken positive, since it is based on the geometry. On the other hand, at point 1, the space vehicle is encountering the pericenter of the selenocentric trajectory; thus, \(\phi _s (t_1 )\) must be taken negative following the sign convention adopted in the two-body dynamics.
The pericenter distance \(r_{sP} \) and the magnitude \(v_{sP} \) of the velocity vector at the periselenium at \(t=t_2 \) (point 2) can be determined as:
where \(\mu _\mathrm{M} \) is the gravitational parameter of the Moon. The semi-major axis \(a_s \) and eccentricity \(e_s \) of the selenocentric trajectory are given by:
and
The time of flight \(\Delta t_{sp} \) to reach the periselenium is given by:
with the hyperbolic eccentric anomaly \(H_s (t_1 )\) obtained from the equation:
Figure 1 also highlights the symmetry between point 1 and point 3 with the line of apsis as the symmetry axis. In this way, the time of flight \(\Delta t_s \) of the selenocentric trajectory is given by:
The main parameters—radial distance \(r_s (t_3 )\), magnitude \(v_s (t_3 )\) of the velocity vector and flight path angle \(\phi _s (t_3 )\)—at \(t=t_3 \), when the space vehicle leaves the Moon’s sphere of influence, are calculated as described in what follows. Firstly, the true anomaly \(f_s (t_1 )\) can be calculated from the equation:
Due to the symmetry, the true anomaly \(f_s (t_3 )\) at \(t=t_3 \) has the same magnitude of \(f_s (t_1 )\), but occurs before the pericenter; therefore:
The angle \(\Delta \), depicted by Fig. 1, is given by:
with the angle \(\lambda _3 \) defined as:
Note that
By symmetry,
At point 3, the space vehicle is moving away from the pericenter, and thus \(\phi _s (t_3 )\) is positive.
1.3 Second geocentric phase
When the space vehicle leaves the Moon’s sphere of influence at \(t=t_3 \), it starts a second geocentric phase defined by a hyperbolic trajectory. From the law of cosines, the magnitude \(r_{g,2} (t_3 )\) of the position vector of the space vehicle relative to the Earth at \(t=t_3 \) is given by
The subscript g, 2 indicates the second geocentric trajectory. The phase angle \(\gamma _3 \) of the space vehicle with the Moon (Fig. 1) can also be determined as:
At point 3,
where \(\mathbf{v}_s (t_3 )\) is the velocity vector of the Moon relative to the Earth, and \(\mathbf{v}_{g,2} (t_3 )\) is the velocity vector of the space vehicle relative to the Earth. The magnitude \(v_{g,2} (t_3 )\) and the flight path angle \(\phi _{g,2} (t_3 )\) are then given by:
Due to the geometry, \(\phi _{g,2} (t_3 )\) is taken positive. Once the variables \(r_{g,2} (t_3 )\), \(v_{g,2} (t_3 )\) and \(\phi _{g,2} (t_3 )\) are known, the parameters \(\varepsilon _{g,2} \), \(h_{g,2} \), \(Q_{g,2} \), \(a_{g,2} \), \(e_{g,2} \), and \(p_{g,2} \) of the second geocentric phase can be calculated from equations quite similar to Eqs. (A.1)–(A.6).
The anomalies \(H_{g,2} (t_3 )\), \(f_{g,2} (t_3 )\) and \(M_{g,2} (t_3 )\) on leaving the Moon’s sphere of influence (point 3) are calculated as follows:
From the geometry, the pericenter argument \(\omega _{g,2} \) of the second geocentric phase is given by:
At \(t=t_4 \), the geocentric trajectory touches the boundary of the Earth’s sphere of influence (point 4 in Fig. 1). Thus,
where \(R_{SE} \) is the radius of the Earth’s sphere of influence, and the anomaly \(f_{g,2} (t_4 )\) is determined as:
The time of flight \(\Delta t_{g,2} \) of the second geocentric phase is given by:
with the anomalies \(M_{g,2} (t_4 )\) and \(H_{g,2} (t_4 )\) determined from equations similar to Eqs. (A.40) and (A.39), respectively.
1.4 Heliocentric phase
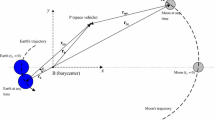
The heliocentric phase describes the motion of the space vehicle from its departure from the Earth’s sphere of influence until it reaches the Mars’s sphere of influence. This phase is characterized by an elliptic trajectory. Note that the position vector \(\mathbf{r}_\mathrm{he} (t_4 )\) and the velocity vector \(\mathbf{v}_\mathrm{he} (t_4 )\) of the space vehicle in the heliocentric phase at \(t=t_4 \) still cannot be determined, because the position of the Earth on its orbit around the Sun is unknown. To link the position of Earth, the angle \(\lambda _S \) (Fig. 2) must be specified. This angle characterizes the geometry of departure of the space vehicle from the Earth’s sphere of influence and cannot be chosen arbitrarily, since it is part of the solution of the problem. For a given \(\lambda _S \), the variables \(r_\mathrm{he} (t_4 )\) and \(v_\mathrm{he} (t_4 )\) at the beginning of the heliocentric phase are calculated as:
\(D_E \) is the Sun–Earth distance, and \(v_E =\omega _E D_E \) is the velocity of the Earth around the Sun. The flight path angle \(\phi _\mathrm{he} (t_4 )\) is given by:
where \(\gamma _5 \) is the phase angle between the space vehicle and the Earth as shown in Fig. 2 and is given by:
From the geometry, the pericenter argument of the heliocentric trajectory is determined as:
where \(\theta _{S0} \) is the initial phase angle of the Sun as seen from the Earth at the initial time and calculated as follows:
and, with the anomalies \(f_\mathrm{he} (t_4 )\), \(E_\mathrm{he} (t_4 )\) and \(M_\mathrm{he} (t_4 )\) determined as:
The eccentricity \(e_\mathrm{he} \) and the semilatus rectum \(p_\mathrm{he} \) are obtained from equations quite similar to Eqs. (A.1)–(A.6).
At the time \(t=t_5 \), the heliocentric trajectory intercepts the Mars’s sphere of influence (point 5) with the angle \(\lambda _{\mathrm{M}_t } \) as depicted in Fig. 2. At this moment, the distance of the space vehicle to the Sun \(r_\mathrm{he} (t_5 )\) is determined as:
where \(D_{\mathrm{M}_t } \) is the Sun–Mars distance, and \(R_{\mathrm{SM}_t } \) is the radius of Mars’s sphere of influence. Note that the distance \(r_\mathrm{pla} (t_5 )=R_{\mathrm{SM}_t } \). The phase angle \(\gamma _6 \) of the space vehicle at the point 5 (Fig. 5) is given by
The magnitude \(v_\mathrm{he} (t_5 )\) of the velocity vector and the flight path angle \(\phi _\mathrm{he} (t_5 )\) are given by expressions similar to Eqs. (A.9) and (A.10), but utilizing the gravitational parameter of the Sun \(\mu _S \). From equations similar to Eqs. (A.53)–(A.55), the anomalies \(f_\mathrm{he} (t_5 )\), \(E_\mathrm{he} (t_5 )\) and \(M_\mathrm{he} (t_5 )\) are calculated.
The time of flight \(\Delta t_\mathrm{he} \) is given by the expression below:
From the geometry, the pericenter argument of the heliocentric trajectory is obtained as:
1.5 Planetocentric phase
The planetocentric phase is characterized by a hyperbolic trajectory relative to the target planet (Mars), and at point 5,
where \(\mathbf{v}_\mathrm{pla} (t_5 )\) is the velocity vector of the space vehicle relative to Mars, and \(\mathbf{v}_{\mathrm{M}_t } (t_5 )\) is the velocity vector of Mars at \(t=t_5 \). The mathematical formulation of this phase is analogous to the selenocentric phase, but with the parameters of the target planet replacing the Moon’s parameters. The velocity of Mars around the Sun \(v_{\mathrm{M}_t } =\omega _{\mathrm{M}_t } D_{M_t } \) and the gravitational parameter \(\mu _{\mathrm{M}_t } \) of Mars are used. The angles \(\lambda _1 \) and \(\gamma _1 \) are replaced by \(\lambda _{M_t } \) and \(\gamma _6 \), respectively (see Fig. 2). The time \(t_5 \) and \(t_f \) correspond to the time \(t_2 \) and \(t_3 \) of the selenocentric phase, respectively. The space vehicle reaches the pericenter of the planetocentric phase at \(t=t_f \).
Rights and permissions
About this article

Cite this article
Gagg Filho, L.A., Fernandes, S.d.S. Interplanetary patched-conic approximation with an intermediary swing-by maneuver with the moon. Comp. Appl. Math. 37 (Suppl 1), 27–54 (2018). https://doi.org/10.1007/s40314-017-0529-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40314-017-0529-7