
Abstract
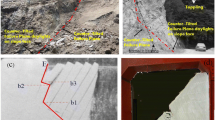
A broad mathematical technique for evaluating rock slope stability subjected to toppling of rock columns centered on limit equilibrium is presented. In the current analytical models for evaluating toppling of rock columns for the rock slopes, a single weak plane angle is assumed, running from the top surface of the slope and daylights on the toe of the slope. However, in some physical rock slopes, there exists counter-tilted failure surface within the rock masses of the rock slope and the weak plane may not daylight on the predictable point on the face of the slope following the assumed single weak plane angle. Therefore, applying the current analytical techniques in such conditions may not yield realistic results. A searching technique for estimating angles of counter-tilted failure surface is proposed and incorporated into the existing mathematical technique for evaluating toppling of rock columns centering on limit equilibrium principles. The physical slope with counter-tilted failure surface was comprehensively analyzed using the modified mathematical method and results were validated by numerical simulation using 3DEC 4.1 discrete element method. The influences of relative angles of the counter-tilted failure surfaces on the slope stability have been studied and the results show that, progressive increase of the counter-tilted failure surface angles lead to gradual increase in slope instability. The modified analytical method optimizes and combines the advantages of the traditional analytical techniques and could provide precise analytical method for evaluating stability of rock slopes with counter-tilted planar failure surfaces subjected to toppling of rock columns.








Similar content being viewed by others

References
Alejano LR, Gómez Márquez I, Pons B, Bastante FG, Alonso E (2006) Stability analysis of a potentially toppling over-tilted slope in granite. In: 4th Asian rock mechanics symposium, Singapore, 2006, pp 519–532
Alejano LR, Gómez Márquez I, Martinez-Algeria R (2010) Analysis of a complex toppling-circular slope failure. Eng Geol 114(1):93–104
Amini M, Majdi A, Veshadi MA (2012) Stability analyses of rock slopes against block-flexure toppling failure. Int J Rock Mech Rock Eng 45(4):519–532
Adhikary DP, Dyskin AV, Jewell RJ, Stewart DP (1997) A study of the mechanism of flexural-toppling failure of rock slopes. Rock Mech Rock Eng 30:75–93
Mohtarami E, Jafari A, Amini M (2014) Stability analyses of slopes against combined toppling failure. Int J Rock Mech Min Sci 67(1):43–45
De Freitas MH, Watters RJ (1973) Some field examples of toppling failure. Int J Rock Mech Min Sci 43:55–56
Wyllie DC (1980) Toppling rock slope failure examples of analyses and stabilizations. Rock Mech 13:89–98
Goodman RE, Bray JW (1976) Toppling of rock slopes. In: Boulder CO (ed) Proceedings of the specialty conference on rock engineering for foundation and slopes. American Society of Civil Engineers, New York, 15–18 August, 1976, pp 201–123
Zanbak C (1983) Design charts for rock slopes susceptible to toppling. J Geotech Eng 109(1):1039–1062
Cruden DM (1989) Limits to common toppling. Can Geotech J 26:737–742
Aydan O, Shimizu Y, Ichikawa Y (1989) The effective failure modes and stability of slopes in rockmass with two discontinuity sets. Rock Mech Rock Eng 22(3):163–188
Wyllie DC (1999) Foundations on rock, 2nd edn. Taylor and Francis, London, p 401
Amini M, Majdi A (2011) Analysis of geo-structural defects in flexural toppling failure. Int J Rock Mech Min Sci 48:175–186
Bobet A (1999) Analytical solutions for toppling failure. Int J Rock Mech Min Sci 36(1):971–980
Sagaseta C, Sánchez JM, Can’izal J (2001) A general analytical solution for the required anchor force in rock slopes with toppling failure. Int J Rock Mech Min Sci 38(1):421–435
Liu CH, Jaksa MB, Meyers AG (2008) Analytical approaches for toppling stability analyses of rock slopes. Int J Rock Mech Min Sci 45(1):1361–1372
Liu CH, Jaksa MB, Meyers AG (2009) A transfer coefficient method for rock slope toppling. Can Geotech J 46(1):1–9
Liu CH, Jaksa MB, Meyers AG (2010) Toppling mechanisms of rock slopes considering stabilization from the underlying rockmass. Int J Rock Mech Min Sci 71(1):1–11
Babiker AFA, Smith CC, Gilbert M, Ashby JP (2014) Non associative limit analysis of the toppling-sliding failure of rock slopes. Int J Rock Mech Min Sci 71:1–11
Tatone BSA, Grasselli G (2010) ROCKTOPPLE: a spreadsheet-based program for probabilistic block toppling analyses. Comput Geosci 36(1):98–114
Chen C, Zheng Y, Sun C (2016) An analytical approach on Flexural toppling failure of counter-tilt slopes of layered rock. Chin J Rock Mech Eng 34(2):505–511
Zheng Y, Chen C, Liu T, Xia K, Liu X (2017) Stability analysis of rock slopes against sliding or flexural-toppling failure. Bull Eng Geol Environ 2017:1435–9529
Aydan O, Kawamoto T (1992) Stability of slopes and underground openings against flexural toppling and their stabilization. Rock Mech Rock Eng 1992:143–165
Zuo BC, Chen CX, Lie XW, Shen Q (2005) Modeling experiment study on failure mechanism of counter-tilt rock slope. Chin J Rock Mech Eng 34:3505–3511
Cai JS (2013) Mechanism research of toppling deformation for homogeneous equal thickness anti-dip layered rock slopes. MSc thesis, China University of Geosciences, Beijing
Pritchard MA, Savigny KW (1990) Numerical modeling of toppling. Can Geotech J 27:823–834
Pritchard MA, Savigny KW (1991) The heather hill landslide: an example of a large scale toppling failure in a natural slope. Can Geotech J 28:410–422
Itasca (2008) Three dimensional distinct element codes 3DEC 4.1. Itasca Consulting Group Inc, Minneapolis
Acknowledgements
This paper was supported by the National Natural Science Foundation of China, Project No. 51374163.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Limiting Equilibrium for Toppling of the nth Block
To determine the magnitude of \( P_{n} \), we set the moment about the pivot point 0 to zero (refer Fig. 4). Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi_{d} \)) is equal to the friction angle on the bases (\( \phi_{p},\,\,\phi_{c} \)), thus \( \phi_{d} = \phi_{p} = \phi_{c} = \phi \). Therefore, before counter-tilting of the weak plane along base plane \( \psi_{p} \) with respect to the horizontal, we have
This can be rewritten as;
Therefore, we get the following equation for \( P_{n} \)
To determine the magnitude of \( P_{n} \) due to counter-tilting of the weak plane along base plane \( \psi_{c} \) with respect to the horizontal, we set the moment about the pivot point 0 to zero. We have;
This can be rewritten as;
Therefore, we get the following equation for \( P_{n,t} \) due to counter-tilting of the weak plane
Appendix 2: Limiting Equilibrium for Sliding of the nth Block
To determine the magnitude of Pns, we set the sum of the forces in both the horizontal and vertical directions to zero (taking the horizontal axis to be along the base plane, at the angles \( \psi_{p} \) or \( \psi_{c} \) with respect to horizontal refer Fig. 4 c in the manuscript.
Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi_{d} \)) is equal to the friction angle on the bases (\( \phi_{p},\phi_{c} \)), thus \( \phi_{d} = \phi_{p} = \phi_{c} = \phi \). Therefore, before counter-tilting of the weak plane along base plane \( \psi_{p} \) with respect to the horizontal, we have
where \( S_{n} \) is the shear force along the Column-base contact. From the Mohr–Coulomb criterion, we have
where, \( \tau_{n} \) Shear stress along the column-base contact \( \sigma_{n} \) Normal stress at the column-base contact.
Thereafter we assumed cohesion (c) is equal to zero and divide both sides of the equation by the column-base contact area denoted by A. Thus, we get
where, \( R_{n} \) normal force across the column-base contacts (\( W_{n}\cos \psi_{p} \))
By solving the Fy equation for \( R_{n} \) and substituting into the Fx equation before counter-tilting of the weak plane along base plane \( \psi_{p} \) with respect to the horizontal, we have,
This leads;
Therefore, we get the following equation for \( P_{ns} \)
However, after counter-tilting of the weak plane along base plane \( \psi_{c} \) with respect to the horizontal, we have
By solving the Fy equation for \( R_{n} \) and substituting into the Fx equation after counter-tilting of the weak plane along base plane \( \psi_{c} \) with respect to the horizontal, we have,
This leads;
Therefore, we get the following equation for \( P_{ns} \)
Appendix 3: Anchor Tension Required to Prevent Toppling of Block 1
Once it is determined that block 1 in Fig. 4c will topple then the tensioned cables can be installed through block 1 and anchored in stable rockmass beneath the zone of toppling to prevent toppling of block 1. We further assume that the anchor is installed at a plunge angle of \( \psi_{T} \) through block 1 at a distance L1 above the base. When the force T is applied to block 1, the normal and shear force on the base of the block 1 are, respectively
To determine the magnitude of \( T_{t} \), we set the moment about the pivot point 0 to zero
If there exists the counter-tilted weak plane at angle \( \psi_{c} \) to the horizontal line, the normal and shear force on the base of the block 1 are, respectively
To determine the magnitude of \( T_{t} \), we set the moment about the pivot point 0 to zero
Appendix 4: Anchor Tension Required to Prevent Sliding of Block 1
Once it is determined that block 1 in Fig. 4c will slide then the tensioned cables can be installed through block 1 and anchored in stable rockmass beneath the zone of sliding to prevent movements of block 1. We further assume that the anchor is installed at a plunge angle of \( \psi_{T} \) through block 1 at a distance L1 above the base. Therefore, with the weak plane along base plane \( \psi_{p} \) with respect to the horizontal, we have
When the force T is applied to block 1, the normal and shear force on the base of the block 1 are, respectively
By solving the Fy equation for \( Rn \) and substituting into the Fx equation before counter-tilting of the weak plane along base plane \( \psi_{p} \) with respect to the horizontal, we have,
Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi_{d} \)) is equal to the friction angle on the bases (\( \phi_{p},\phi_{c} \)), thus \( \phi_{d} = \phi_{p} = \phi_{c} = \phi \).
Therefore, with the weak plane counter-tilted along base plane \( \psi_{c} \) with respect to the horizontal, we have
If there exists the counter-tilted weak plane at angle \( \psi_{c} \) to the horizontal line, then, when the force T is applied to block 1, the normal and shear force on the base of the block 1 are, respectively
By solving the Fy equation for \( R_{n} \) and substituting into the Fx equation after counter-tilting of the weak plane along base plane \( \psi_{c} \) with respect to the horizontal, we have,
Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi_{d} \)) is equal to the friction angle on the bases (\( \phi_{p},\phi_{c} \)), thus \( \phi_{d} = \phi_{p} = \phi_{c} = \phi \).
Rights and permissions
About this article

Cite this article
Bowa, V.M., Xia, Y. Modified Analytical Technique for Block Toppling Failure of Rock Slopes with Counter-Tilted Failure Surface. Indian Geotech J 48, 713–727 (2018). https://doi.org/10.1007/s40098-018-0303-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40098-018-0303-9