
Abstract
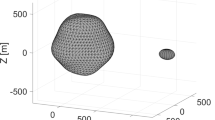
Future missions to small bodies demand higher level of autonomy in the Guidance, Navigation and Control system for higher scientific return and lower operational costs. Different navigation strategies have been assessed for ESA’s asteroid impact mission (AIM). The main objective of AIM is the detailed characterization of binary asteroid Didymos. The trajectories for the proximity operations shall be intrinsically safe, i.e., no collision in presence of failures (e.g., spacecraft entering safe mode), perturbations (e.g., non-spherical gravity field), and errors (e.g., maneuver execution error). Hyperbolic arcs with sufficient hyperbolic excess velocity are designed to fulfil the safety, scientific, and operational requirements. The trajectory relative to the asteroid is determined using visual camera images. The ground-based trajectory prediction error at some points is comparable to the camera Field Of View (FOV). Therefore, some images do not contain the entire asteroid. Autonomous navigation can update the state of the spacecraft relative to the asteroid at higher frequency. The objective of the autonomous navigation is to improve the on-board knowledge compared to the ground prediction. The algorithms shall fit in off-the-shelf, space-qualified avionics. This note presents suitable image processing and relative-state filter algorithms for autonomous navigation in proximity operations around binary asteroids.













Similar content being viewed by others

Abbreviations
- t :
-
Time (s)
- \({\mathbf{x}}\) :
-
Augmented state vector
- \({\mathbf{r}}\) :
-
Spacecraft position vector (m)
- r :
-
Spacecraft position norm (scalar) (m)
- \({\mathbf{v}}\) :
-
Spacecraft velocity vector (m/s)
- v :
-
Spacecraft velocity norm (scalar) (m/s)
- \({\mathbf{a}}_{\text{CTRL}}\) :
-
Thruster acceleration vector (m/s2)
- \({\mathbf{r}}_{S}\) :
-
Secondary asteroid position vector (m)
- C :
-
Margin on pericenter velocity (−)
- m :
-
Spacecraft mass (kg)
- µ :
-
Gravity parameter of the asteroid system (m3/s2)
- µ P :
-
Gravity parameter of the primary asteroid (m3/s2)
- µ S :
-
Gravity parameter of the secondary asteroid (m3/s2)
- \({\varvec{\upvarepsilon}}_{\text{COB}}\) :
-
Position of the COB wrt the COM in the detector plane (pixel)
- \(p_{\text{COB}}\) :
-
Expected position of the COM in the detector plane (pixel)
- L :
-
Unit vector direction to the asteroid COM in the detector frame (−)
- \({\mathbf{u}}_{\det }\) :
-
Direction of the Sun in the detector plane (−)
- φ :
-
Sun phase angle (rad)
- R :
-
Asteroid mean radius (m)
- h :
-
Pixel angular size (rad)
- \({\mathbf{A}}\) :
-
Rotation matrix from inertial frame to detector frame (−)
References
Carnelli, I., Galvez, A., Mellab, K., Kueppers, M.: Asteroid impact mission (AIM): a unique opportunity to demonstrate planetary defense. In: 4th IAA planetary defense conference, 13–17 April 2015, Frascati, Italy, Paper IAA-PDC-15-04-03. http://iaaweb.org/iaa/ScientificActivity/conf/pdc2015/IAA-PDC-15-04-03.pdf. Cited 8 Feb 2017
Michel, P., Cheng, A., Küppers, M., et al.: Science case for the asteroid impact mission (AIM): a component of the asteroid impact & deflection assessment (AIDA) mission. Adv Sp Res 57, 2529–2547 (2016). https://doi.org/10.1016/j.asr.2016.03.031
Grieger, B.: Asteroid impact mission: payload operations document. ESA/ESAC, Issue 3, Revision 6, 9 Nov (2016)
Sierks, H., Keller, H.U., Jaumann, R., et al.: The dawn framing camera. Sp Sci Rev 163, 263–327 (2011). https://doi.org/10.1007/s11214-011-9745-4
Pellacani, A., Cabral, F. et al.: Semi-autonomous attitude guidance using relative navigation based on line of sight measurements–AIM scenario. In: IAC-17.C1.3.1x40983, 68th international astronautical congress (IAC), Adelaide, Australia, 25–29 September (2017)
Asteroid Impact Mission: Didymos and Ejecta Reference Model. ESA/HQ, Issue 5, Revision 1, 11 Feb (2016)
Simon, D.: Optimal state estimation, vol. 14. Wiley, Hoboken (2006)
Gil-Fernandez, J., Di Domenico, M., Dominguez, C., Suatoni, M. et al.: Autonomous GNC system for Marco-Polo asteroid sample and return mission. In: 9th international ESA conference on guidance, navigation & control systems, Porto, Portugal, 2–6 June (2014)
Gil-Fernandez, J., Prieto-Llanos, T., Cadenas, R., Drai, R. (2012) Autonomous GNC for proximity operations around asteroids. In: 5th international conference on astrodynamics tools and techniques (ICATT), ESA/ESTEC, Noordwijk, The Netherlands 29 May–1 June (2012)
Gil-Fernandez, J., Prieto-Llanos, T., Lanza, P. et al.: Vision-based navigation system for the Rendezvous phase of mars sample return mission. In: IAC-13.A3.3C.10, 64th International Astronautical Congress, Beijing, China (2013)
Gil-Fernandez, J., Prieto-Llanos, T., Huovelin, J., Giordano, P.: Autonomous deep space navigation with X-ray pulsars. In: IAC-13.A3.5.1, 64th international astronautical congress, Beijing, China (2013)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gil-Fernandez, J., Ortega-Hernando, G. Autonomous vision-based navigation for proximity operations around binary asteroids. CEAS Space J 10, 287–294 (2018). https://doi.org/10.1007/s12567-018-0197-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-018-0197-5