
Abstract
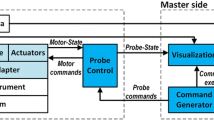
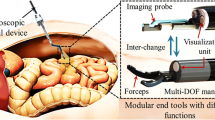
One of the current limitations in MIS robotic surgery is the limited field of view due to the use of a sole rigid 3D–imaging camera. This study proposes a modular 2D flexible imaging probe that can be integrated to the teleoperated surgical robot, RAVEN, in order to provide visual access in real time to occluded surgical targets. The probe proposed in this work guides a state–of–the–art scanning fiber endoscope SFE with minimal actuation. It is based on a modular axis–shared conception that avoids interruptions in the surgical flow to connect or exchange the device. The viewpoint from the probe is adjusted by a surgeon from the robot master console with independent actuation, sensing and control from the robot system. A 2–Hz oscillating mock–up model of the abdominal cavity containing several points of interest occluded for the central camera is used to test the capabilities of the probe. Results show how the totality of these interest points are visualized using the flexible probe to improve the information at the surgeon site. Motion compensation with image stabilization techniques are incorporated to improve unfocused and blurred images as well as to maintain the field of view for the target during the manipulation. The experimental results in this case were compared to those of one of the conventional software solutions, and provided 45.9% less maximum error than the conventional software during the simple surgical procedure.
Similar content being viewed by others

References
W. M. Brinkman, J. M. Luursema, B. Kengen, B. M. A. Schout, J. A. l. Witjes, and R. L. Bekkers, “da Vinci skills simulator for assessing learning curve and criterion–based training of robotic basic skills,” Urology, vol. 81, pp. 562–566, March 2013.
V. Vitiello, S.–L. Lee, T. P. Cundy, and G.–Z. Yang, “Emerging robotic platforms for minimally invasive surgery,” IEEE Reviews in Biomedical Engineering, vol. 6, pp. 111–126, 2013.
M. J. H. Lum, D. C. W. Friedman, H. H. I. King, R. Donlin, G. Sankaranarayanan, T. J. Broderick, M. N. Sinanan, J. Rosen, and B. Hannaford, “Teleoperation of a surgical robot via airborne wireless radio and transatlantic internet links,” C. Laugier and R. Siegwart (eds), Field and Service Robotics, Springer Tracts in Advanced Robotics, vol. 42, Springer, Berlin, Heidelberg, 2008.
B. M. Harnett, C. R. Doarn, J. Rosen, and B. Hannaford, and T. J. Broderick, “Evaluation of unmanned airborne vehicles and mobile robotic telesurgery in an extreme environment,” Telemedicine & e–Health, vol. 14, pp. 539–544, 2008.
H. H. King, K. Tadano, R. Donlin, D. Friedman, M. J. H. Lum, V. Asch, C. Wang, K. Kawashima, and B. Hannaford, “Preliminary protocol for interoperable telesurgery,” Proc. of International Conference on Advanced Robotics, ICAR 2009. pp. 1–6, 2009.
D. C. W. Friedman, J. Dosher, T. Kowalewski, J. Rosen, and B. Hannaford, “Automated tool handling for the trauma pod surgical robot,” Proc. of IEEE International Conference on Robotics and Automation, pp. 1936–1941, 2007.
SPORT surgical system, http://www.titanmedicalinc.com/technology/, Accessed: 2018.10–26.
S. Gidaro, M. Buscarini, E. Ruiz, M. Stark, and A. Labruzzo, “Telelap ALF–X: a novel telesurgical system for the 21st century,” Surgical Technology International, vol. 22, pp. 20–25, 2012.
M. Piccigallo, U. Scarfogliero, C. Quaglia, G. Petroni, P. Valdastri, A. Menciassi, and P. Dario, “Design of a novel bimanual robotic system for single–port laparoscopy,” IEEE/ASME Transactions on Mechatronics, vol. 15, no. 6, pp. 871–878, 2010.
D. P. Noonan, D. S. Elson, G. P. Mylonas, A. Darzi, and G.–Z. Yang, “Laser–induced fluorescence and reflected white light imaging for robot–assisted mis,” IEEE Transactions on Biomedical Engineering, vol. 56, no. 3, pp. 889–892, 2009.
M. E. Rentschler, J. Dumpert, S. R. Platt, S. I. Ahmed, S. M. Farritor, and D. Oleynikov, “Mobile in vivo camera robots provide sole visual feedback for abdominal exploration and cholecystectomy,” Surgical Endoscopy And Other Interventional Techniques, vol. 20, no. 1, pp. 135–138, 2006.
H. S. Yoon, Y. Choi, and B. J. Yi, “A 4–dof bendable endoscope mechanism for single port access surgery, workshop. snakes, worms and catheters: Continuum and serpentine robots for minimally invasive surgery.,” Proc. of IEEE International Conference on Robotics and Automation (ICRA), 2010.
N. Simaan, K. Xu, W. Wei, A. Kapoor, P. Kazanzides, R. Taylor, and P. Flint, “Design and integration of a telerobotic system for minimally invasive surgery of the throat,” The International Journal of Robotics Research, vol. 28, no. 9, pp. 1134–1153, 2009.
P. E. Dupont, J. Lock, and E. Butler, “Torsional kinematic model for concentric tube robots,” Proc. of IEEE International Conference on Robotics and Automation, ICRA’ 09, pp. 3851–3858, 2009.
C. A. Velasquez, H. H. King, B. Hannaford, and W. J. Yoon, “Development of a flexible imaging probe integrated to a surgical telerobot system: Preliminary remote control test and probe design,” Proc. of the 4th IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), pp. 894–898, 2012.
W. Yoon, C. Velasquez, L. White, B. Hannaford, Y. Kim, and T. Lendvay, “Preliminary articulable probe designs with raven and challenges: image guided robotic surgery multi–tool system,” Journal of Medical Devices ASME, vol. 8, 2014.
C. A. Velasquez, N. V. Navkar, A. Alsaied, S. Balakrishnan, J. Abinahed, A. Al–Ansari, and W. J. Yoon, “Preliminary design of an actuated imaging probe for generation of additional visual cues in a robotic surgery,” Surgical Endoscopy, vol. 30, no. 6, pp. 2641–2648, June 2016.
B. G. Horn and B. K. P. Schunck, “Determining optical flow,” Artificial Intelligence, vol. 17, pp. 185–203, 1983.
B. D. Lucas and T. Kanade, “An iterative image registration technique with an application to stereo vision,” Proc. of the 7th International Joint Conference on Artificial Intelligence–Volume 2, San Francisco, CA, USA, pp. 674–679, 1981.
S. S. Cho and Y. S. Son, Time Series Analysys, Yulgok Publishing Company, 2002.
G. A. Costello, “Large deflections of helical spring due to bending,” Journal of the Engineering Mechanics Division, vol. 103, no. 3, pp. 481–487, May/June 1977.
E. J. Seibel, C. M. Brown, J. A. Dominitz, and M. B. Kimmey, “Scanning single fiber endoscopy: a new platform technology for integrated laser imaging, diagnosis, and future therapies,” Gastrointestinal Endoscopy Clinics of North America, vol. 18, no. 3, pp. 467–478, 2008.
S. G. Lee, H. J. Lee, Y. W. Choi, and T. H. Kang, “Digital image stabilization based on edge detection and lucaskanade optical flow,” Journal of Korea Robotics Society, vol. 5, vol. 85–92, 2010.
H. Chris and M. Stephens, “A combined corner and edge detector,” Alvey Vision Conference, vol. 15, page 50, 1988.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Jiuxiang Dong under the direction of Editor Fuchun Sun.
Carlos A. Velasquez received the B.S. degree in Mechanical Engineering from the National University of Colombia in 1995, and the M.S. and Ph.D. degrees in Information Sciences from Tohoku University, Japan, in 2000 and 2005 respectively. From 2006 to 2010 he worked in Hardware in the Loop technology at dSPACE Japan. He was a postdoctoral researcher at INSA de Lyon, France from 2010 to 2011 and at Qatar University, Department of Mechanical & Industrial Engineering from 2011 to 2014. In 2014 he joined the Medical Research Division of Hamad Medical Corporation in Qatar. His current research interests are surgical robotics and medical devices development.
Yoon Sang Kim obtained his B.S., M.S., and Ph.D. degrees in Electrical Engineering from Sungkyunkwan University, Seoul, Korea, in 1993, 1995, and 1999, respectively. Since March 2005, he has been a professor at the School of Computer and Science Engineering, Korea University of Technology Education (KoreaTech), Cheonan, Korea. His current research interests include Virtual simulation, Power–IT technology, and Bio–informatics.
Thomas Lendvay is an Associate Professor in the Department of Urology at the University ofWashington and Co–Director of the Seattle Children’s Hospital Robotic Surgery Center. His research thrusts are in surgical skills acquisition and learning curve acceleration. He has active Department of Defense extramural funding to explore the hypothesis that virtual reality robotic warm–up primes surgeons to improve their technical skills in clinical surgery. He has spent over a decade in the Biorobotics Engineering Laboratory under the Principal Investigator, Professor Blake Hannaford, helping guide the clinical applications to novel robotic surgery technologies.
Blake Hanaford received the B.S. degree in Engineering and Applied Science from Yale University in 1977, and the M.S. and Ph.D. degrees in Electrical Engineering from the University of California, Berkeley. From 1986 to 1989 he worked on the remote control of robot manipulators in the Man–Machine Systems Group in the Automated Systems Section of the NASA Jet Propulsion Laboratory, Caltech and supervised that group from 1988 to 1989. Since September 1989, he has been at the University of Washington in Seattle, where he is Professor of Electrical Engineering. He was awarded the National Science Foundation’s Presidential Young Investigator Award, the Early Career Achievement Award from the IEEE Engineering in Medicine and Biology Society, and was named IEEE Fellow in 2005. His currently active interests include haptic feedback and surgical robotics. He is a member of the steering committee of theWorld Haptics Congress, His lab URL is http://brl.ee.washington.edu. In 2014 and 2015, he was on part time leave at Google Life Sciences.
W. Jong Yoon is an associate professor in Mechanical engineering at the University of Washington Bothell. Dr. Yoon obtained his B.E. degree from Hong Ik University, Seoul, in 1995, and the M.S. and Ph.D. degrees from the University of Washington, Seattle, in 2004 and 2009, respectively, all in mechanical engineering. Prior to joining UW Bothell School of STEM, he held an appointment as an assistant professor in the Department of Mechanical & Industrial Engineering, Qatar University, Qatar, from 2009 to 2014. From 1997 to 2001, he was with Samsung Electro–Mechanics, Korea, as a research engineer and designed various precision motors for information and optical devices.
Rights and permissions
About this article

Cite this article
Velasquez, C.A., Kim, Y.S., Lendvay, T.S. et al. RAVEN Eyes Around the Instrument from Modular Axis Sharing. Int. J. Control Autom. Syst. 17, 454–464 (2019). https://doi.org/10.1007/s12555-017-0228-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-017-0228-6