
Abstract
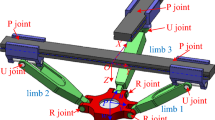
The elastostatic stiffness performance of a 2PUR-PSR (S: spherical joint; U: universal joint; R: revolute joint; P: prismatic pair) overconstrained parallel mechanism with two rotational and one translational (2R1T) degrees of freedom was studied based on screw theory and strain energy. First, the actuator and constraint wrenches of the mechanism were obtained based on screw theory. Second, by considering the space composite elastic deformation of the rod (including axial tension, and shear, torsional and bending deformation), compact limb stiffness matrixes were obtained in terms of strain energy and Castigliano’s second theorem. Finally, analytic expressions for the overall stiffness matrix of the mechanism and the amplitudes of the actuator and constrained wrenches were obtained based on the virtual-work principle and the balance equation for a moving platform. The relative error between results from the analytical model and the Workbench finite element model is approximately 1.3%, which validates the effectiveness of the proposed elastostatic stiffness model. Unlike traditional stiffness evaluation index, a regional stiffness index was proposed to measure the mechanism’s stiffness performance at various working heights. Using the index, it is possible to determine the optimum stiffness region of a moving platform with known external wrenches.








Similar content being viewed by others

References
Merlet, J. P. (2002). Parallel robots. Dordrecht: Kluwer Academic Publishers.
Tsai, L. W. (1999). Robot analysis: The mechanics of serial and parallel manipulators. New York: Wiley.
Huang, Z., Kong, L. F., & Fang, Y. F. (1997). Mechanism theory of parallel robotic manipulator and control. Beijing: China Machine Press.
Xu, Y. D., Yao, J. T., & Zhao, Y. S. (2015). Method for force analysis of the overconstrained parallel mechanism considering the link’s spatial composite elastic deformations. Journal of Mechanical Engineering, 51(7), 53–60.
Li, Q. C., Chai, X. X., & Chen, Q. H. (2013). Analysis of rotational axes of 2-UPR-SPR parallel mechanism. Journal of Mechanical Engineering, 49(21), 62–69.
Zhao, Y. S., Liu, W. L., & Xu, Y. D. (2015). A numerical simulation method for force analysis of an overconstrained PM. China Mechanical Engineering, 26(21), 1576–1583.
Zhao, Y. S., Xu, Y. D., & Yao, J. T. (2014). A force analysis method for overconstrained parallel mechanisms. China Mechanical Engineering, 25(6), 711–717.
Xu, Y. D., Liu, W. L., Yao, J. T., & Zhao, Y. S. (2015). A method for force analysis of the overconstrained lower mobility parallel mechanism. Mechanism and Machine Theory, 88, 31–48.
Zhou, Y. L., Liu, L., & Gao, F. (2008). Static full-solutions of spherical parallel mechanism 3-RRR with 3-DOF. Chinese Journal of Mechanical Engineering, 44(6), 169–176.
Zhou, Y. L., Yang, L., Li, B., Zeng, D. X., & Gao, F. (2013). Stiffness analysis of spherical parallel mechanism Up+R with 2-DOF. Journal of Harbin Institute of Technology, 20(4), 41–47.
Deblaise, D., Hernot, X., & Maurine, P. (2006). A systematic analytical method for PKM stiffness matrix calculation. In Proceedings of IEEE international conference on robotics and automation (ICRA) (pp. 4213–4219).
Huang, Z., Zhao, Y., & Liu, J. F. (2010). Kinetostatic analysis of 4-R (CRR) parallel manipulator with overconstraints via reciprocal-screw theory. Advances in Mechanical Engineering, 2010(2), 1652–1660.
Zhao, Y., & Huang, Z. (2010). Force analysis of lower-mobility parallel mechanisms with over-constrained couples. Journal of Mechanical Engineering, 46(5), 15–21.
Wang, H., Zhang, L. S., Chen, G. L., & Huang, S. Z. (2017). Parameter optimization of heavy-load parallel manipulator by introducing stiffness distribution evaluation index. Mechanism and Machine Theory, 108, 244–259.
Zhang, J., Zhao, Y. Q., & Jin, Y. (2016). Kinetostatic-model-based stiffness analysis of Exechon PKM. Robotics and Computer-Integrated Manufacturing, 37(C), 208–220.
Enferadi, J., & Tootoonchi, A. A. (2011). Accuracy and stiffness analysis of a 3-RRP spherical parallel manipulator. Robotica, 29(2), 193–209.
Rezaei, A., Akbarzadeh, A., & Enferadi, J. (2010). Stiffness analysis of a spatial parallel mechanism with flexible moving platform. In Proceedings of the ASME conference on engineering systems design and analysis (ESDA) (pp. 647–655).
Rezaei, A., Akbarzadeh, A., & Akbarzadeh-T, M. R. (2012). An investigation on stiffness of a 3-PSP spatial parallel mechanism with flexible moving platform using invariant form. Mechanism and Machine Theory, 51(5), 195–216.
Rezaei, A., & Akbarzadeh, A. (2013). Position and stiffness analysis of a new asymmetric 2PRR–PPR parallel CNC machine. Advanced Robotics, 27(2), 133–145.
Yan, S. J., Ong, S. K., & Nee, A. Y. C. (2016). Stiffness analysis of parallelogram-type parallel manipulators using a strain energy method. Robotics and Computer-Integrated Manufacturing, 37(C), 13–22.
Hu, B., & Huang, Z. (2016). Kinetostatic model of overconstrained lower mobility parallel manipulators. Nonlinear Dynamics, 81(1), 309–322.
Hu, B., & Lu, Y. (2011). Solving stiffness and deformation of a 3-UPU parallel manipulator with one translation and two rotations. Robotica, 29, 815–822.
Hu, B. (2016). Kinematically identical manipulators for the Exechon parallel manipulator and their comparison study. Mechanism and Machine Theory, 103, 117–137.
Lian, B. B., Sun, T., Song, Y. M., Jin, Y., & Price, M. (2015). Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects. International Journal of Machine Tools and Manufacture, 95, 82–96.
Sun, T., Lian, B. B., & Song, Y. M. (2016). Stiffness analysis of a 2-DOF over-constrained RPM with an articulated traveling platform. Mechanism and Machine Theory, 96, 165–178.
Lian, B. B., Sun, T., Song, Y. M., & Wang, X. L. (2016). Passive and active gravity compensation of horizontally-mounted 3-RPS parallel kinematic machine. Mechanism and Machine Theory, 104, 190–201.
Xu, Q.S., & Li, Y.M. (2006). GA-based architecture optimization of a 3-PUU parallel manipulator for stiffness performance. In Proceedings of IEEE 6th world congress on intelligent control and automation (Vol. 2, pp. 9099–9103).
Courteille, E., Deblaise, D., & Maurine, P. (2009). Design optimization of a Delta-like parallel robot through global stiffness performance evaluation. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems (pp. 5159–5166).
El-Khasawneh, B. S., & Ferreira, P. M. (1999). Computation of stiffness and stiffness bounds for parallel link manipulators 1. International Journal of Machine Tools and Manufacture, 39(2), 321–342.
Gosselin, C. M., & Angeles, J. (1991). A global performance index for the kinematic optimization of robotic manipulators. Journal of Mechanical Design, 113(3), 220–226.
Zhang, W. Z., Xu, L. M., Tong, J. H., & Li, Q. C. (2018). Kinematic analysis and dimensional synthesis of 2-PUR-PSR parallel manipulator. Journal of Mechanical Engineering, 54(7), 45.
Acknowledgements
The authors would like to acknowledge the financial support of the National Natural Science Foundation of China (NSFC) under Grant nos. 51775513 and 51525504; the Open Foundation of Zhejiang Provincial Top Key Academic Discipline of Mechanical Engineering under Grant no. ZSTUME02A03; the Science Foundation of JSUT under Grant no. 11610511703; and the Science Foundation of ZSTU under Grant no. 16022015-Y.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, C., Chen, Q., Tong, J. et al. Elastostatic Stiffness Analysis of a 2PUR-PSR Overconstrained Parallel Mechanism. Int. J. Precis. Eng. Manuf. 20, 569–581 (2019). https://doi.org/10.1007/s12541-019-00077-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-019-00077-1