
Abstract
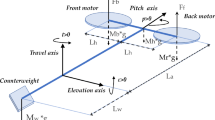
This paper proposes a new asymptotic attitude tracking controller for an underactuated 3-degree-offreedom (DOF) laboratory helicopter system by using a nonlinear robust feedback and a neural network (NN) feedforward term. The nonlinear robust control law is developed through a modified inner-outer loop approach. The application of the NN-based feedforward is to compensate for the system uncertainties. The proposed control design strategy requires very limited knowledge of the system dynamic model, and achieves good robustness with respect to system parametric uncertainties. A Lyapunov-based stability analysis shows that the proposed algorithms can ensure asymptotic tracking of the helicopter’s elevation and travel motion, while keeping the stability of the closed-loop system. Real-time experiment results demonstrate that the controller has achieved good tracking performance.
Similar content being viewed by others

References
J. C. A. Vilchis, B. Brogliato, A. Dzul, et al. Nonlinear modelling and control of helicopter. Automatica, 2003, 39(9): 1583–1596.
M. A. Ishutkina. Design and Implementation of a Supervisory Safety Controller for a 3DOF Helicopter. Cambridge: Massachusetts Institute of Technology, 2004.
D. H. Shim, H. J. Kim. A flight control system for aerial robots: algorithms and experiments. Control Engineering Practice, 2003, 11(12): 1389–1400.
C. Pereira, J. Henriques, A. Dourado. Adaptive RBFNN versus conventional self-tuning: comparison of two parametric model approaches for non-linear control. Control Engineering Practice, 2003, 8(1): 3–12.
A. T. Kutay, A. J. Calise, M. Idan, et al. Experimental results on adaptive output feedback control using a laboratory model helicopter. IEEE Transactions on Control Systems Technology, 2005, 13(2): 196–202.
B. Andrievsky, D. Peaucelle, A. L. Fradkov. Adaptive control of 3DOF motion for LAAS helicopter benchmark: design and experiments. Proceedings of the American Control Conference. New York: IEEE, 2007: 3312–3317.
R. Akmeliawati, A. Legowo. Development of nonlinear energy-based method (NEM) controller for 3 DOF helicopter. Proceedings of the 4th International Conference on Mechatronics. Piscataway: IEEE, 2011: 1–5.
M. Boukhnifer, A. Chaibet, C. Larouci. H-infinity robust control of 3-DOF helicopter. Proceedings of the 9th International Multi-Conference on Systems, Signals, and Devices. Piscataway: IEEE, 2012: 1–6.
T. Kiefer, K. Graichen, A. Kugi. Trajectory tracking of a 3DOF laboratory helicopter under input and state constraints. IEEE Transactions on Control Systemes Technology, 2010, 18(4): 944–952.
Y. Zhai, M. Nounou, H. Nounou, et al. Model predictive control of a 3-DOF helicopter system using successive linearization. International Journal of Engineering, Science and Technology, 2010, 2(10): 9–19.
I. M. Meza-Sanchez, Y. Orlov, L. T. Aguiar. Periodic motion stabilization of a virtually constrained 3-DOF underactuated helicopter using second order sliding modes. Proceedings of the 12th IEEE Workshop on Variable Structure Systems. Piscataway: IEEE, 2012: 422–427.
B. Zheng, Y. Zhong. Robust attitude regulation of a 3-DOF helicopter benchmark: theory and experiments. IEEE Transactions on Industrial Electronics, 2010, 58(2): 660–670.
F. G. M. de Carvalho, E. M. Hemerly. Adaptive output feedback control of an underactuated three degrees-of-freedom model helicopter using neural networks. Proceedings of the 7th IEEE International Conference on Control Applications. Piscataway: IEEE, 2008: 924–929.
K. Yang, B. Xian, X. Li, et al. A nonlinear robust control design combined with neural network for a 3 Degree of Freedom (DOF) helicopter. Proceedings of the 29th Chinese Control Conference. Piscataway: IEEE, 2010: 665–671.
J. Kuvulmaz, E. Zergeroglu. A new high-gain continuous controller scheme for a class of uncertain nonlinear systems. Proceedings of the 46th IEEE Conference on Decision and Control. Piscataway: IEEE, 2007: 2218–2222.
B. Xian, D. M. Dawson, M. S. de Queiroz, et al. A continuous asymptotic tracking control strategy for uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2004, 49(7): 1206–1211.
Y. H. Kim, F. L. Lewis. High-Level Feedback Control With Neural Networks (World Scientific Series in Robotics and Intelligent Systems. Singapore: World Scientific Publishing Co. Ltd., 1999.
X. Liu, J. Guo, B. Zhao, et al. Nonlinear robust attitude tracking control of an underactuated 3 degree-of-freedom helicopter. Proceedings of the Chinese Control Conference. Piscataway: IEEE, 2012: 986–991.
P. M. Patre, W. MacKunis, K. Kaiser, et al. Asymptotic tracking for uncertain dynamic systems via a multilayer neural network feedforward and RISE feedback control structure. IEEE Transactions on Automatic Control, 2008, 53(9): 2180–2185.
Manual of 3 DOF Helicopter System. Googol Technology Ltd., 2005: http://www.googoltech.com.cn/webtechcn/dispro.php?findid=168&flord=pro|53|54&flordname=%E8%87%AA%E5%8A%A8%E6%8E%A7%E5%88%B6&flord2=pro|53|54|55.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the National Natural Science Foundation of China (Nos. 90916004, 60804004) and the Program for New Century Excellent Talents in University (No. NCET-09-0590).
Xiang LIU received his B.S. degree from Nankai University in 2011. He is currently a Ph.D. candidate at Tianjin University. His current research interest is nonlinear control of unmanned aerial vehicles (UAVs).
Bin XIAN is a professor at the Department of Automation Engineering, Tianjin University, and a senior member of IEEE. His main research interests include nonlinear control, unmanned aerial vehicles, and robotics.
Jianchuan GUO received his B.S. and M.S. degrees from Tianjin University of Science and Technology in 2003 and 2008, respectively. He is currently a Ph.D. candidate at the Department of Automation Engineering, Tianjin University. His research interests include modeling and nonlinear control of helicopter, and embedded control system.
Bo ZHAO received his B.S. degree in Engineering from Tianjin University in 2010. He is currently a Ph.D. candidate at Tianjin University. His research interests include nonlinear control system and UAVs.
Chen DIAO received his B.S. degree from Hebei University of Technology in 2007. He is currently a Ph.D. candidate at Tianjin University. His research interests include nonlinear control and adaptive control.
Rights and permissions
About this article
Cite this article
Liu, X., Xian, B., Guo, J. et al. Nonlinear asymptotic attitude tracking control of an underactuated 3-degree-of-freedom helicopter using neural network feedforward term. J. Control Theory Appl. 11, 428–435 (2013). https://doi.org/10.1007/s11768-013-2160-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-013-2160-5