
Abstract
Purpose
This paper presents new quantitative data on a signal-to-noise ratio (SNR) study, distortion study, and targeting accuracy phantom study for our patient-mounted robot (called Arthrobot). Arthrobot was developed as an MRI-guided needle placement device for diagnostic and interventional procedures such as arthrography.
Methods
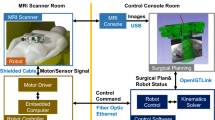
We present the robot design and inverse kinematics. Quantitative assessment results for SNR and distortion study are also reported. A respiratory motion study was conducted to evaluate the shoulder mounting method. A phantom study was conducted to investigate end-to-end targeting accuracy. Combined error considering targeting accuracy, respiratory motion, and structure deformation is also reported.
Results
The SNR study showed that the SNR changes only 2% when the unpowered robot was placed on top of a standard water phantom. The distortion study showed that the maximum distortion from the ground truth was 2.57%. The average error associated with respiratory motion was 1.32 mm with standard deviation of 1.38 mm. Results of gel phantom targeting studies indicate average needle placement error of 1.64 mm, with a standard deviation of 0.90 mm.
Conclusions
Noise and distortion of the MR images were not significant, and image quality in the presence of the robot was satisfactory for MRI-guided targeting. Combined average total error, adding mounting stability errors and structure deformation errors to targeting error, is estimated to be 3.4 mm with a standard deviation of 1.65 mm. In clinical practice, needle placement accuracy under 5 mm is considered sufficient for successful joint injection during shoulder arthrography. Therefore, for the intended clinical procedure, these results indicate that Arthrobot has sufficient positioning accuracy.













Similar content being viewed by others

References
Gopinathan A, Peh WCG (2011) Image-guided facet joint injection. Biomed Imaging Interv J 7(1):e4
Srinivasan S, Peh WCG (2011) Imaging-guided biopsy in musculoskeletal infections. Semin Musculoskelet Radiol 15(5):561–568
Hansford BG, Stacy GS (2012) Musculoskeletal aspiration procedures. Semin Intervent Radiol 29(4):270–285
Magnusson A, Akerfeldt D (1991) CT-guided core biopsy using a new guidance device. Acta Radiol 32(1):83–85
Onik G, Cosman ER, Wells T, Goldberg H, Moss AA, Costello P, Kane RA, Hoddick W, Demas B (1988) CT-guided aspirations for the body: comparison of hand guidance with stereotaxis. Radiology 166(2):389–394
Wu HT, Chang CY, Chang H, Yen CC, Cheng H, Chen PC, Chiou HJ (2012) Magnetic resonance imaging guided biopsy of musculoskeletal lesions. J Chin Med Assoc 75(4):160–166
Fritz J, Thomas C, Clasen S, Claussen CD, Lewin JS, Pereira PL (2009) Freehand real-time MRI-guided lumbar spinal injection procedures at 1.5 T: feasibility, accuracy, and safety. Vasc Interv Radiol 192(4):W161–W167
Mozer PC, Partin AW, Stoianovici D (2009) Robotic image-guided needle interventions of the prostate. Rev Urol 11(1):7–15
Walsh C, Hanumara NC, Slocum AH, Shepard JA, Gupta R (2008) A patient-mounted, telerobotic tool for CT-guided percutaneous interventions. J Med Devices 2(1):011007.1–011007.10
Wu FY, Torabi M, Yamadak A, Golden A, Fischer GS, Tuncali K, Frey DD, Walsh C (2013) An MRI coil-mounted multi-probe robotic positioner for cryoablation. In: Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Portland, Oregon, USA, pp 1–9
Maurin B, Bayle B, Piccin O, Gangloff J, de Mathelin M, Doignon C, Zanne P, Gangi A (2008) A patient-mounted robotic platform for CT-scan guided procedures. IEEE Trans Biomed Eng 55(10):2417–2425
Hungr N, Fouard C, Robert A, Bricault I, Cinquin P (2011) Interventional radiology robot for CT and MRI-guided percutaneous interventions. Med Image Comput Comput Assist Interv 14(1):137–144
Bricault I, Jouniaux E, Zemiti N, Fouard C, Taillant E, Dorandeu F, Cinquin P (2008) A light puncture robot for CT and MRI interventions. IEEE Eng Med Biol Mag 27(3):42–50
Song SE, Tokuda J, Tuncali K, Yamada A, Torabi M, Hata N (2013) Design evaluation of a double ring RCM mechanism for robotic needle guidance in MRI-guided liver interventions. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, pp 4078–4083
Li G, Hao S, Cole GA, Shang W, Harrington K, Camilo A, Pilitsis JG, Fischer GS (2015) Robotic system for MRI-guided stereotactic neurosurgery. IEEE Trans Biomed Eng 62(4):1077–1088
Franco E, Brujic D, Rea M, Gedroyc WM, Ristic M (2015) Needle-guiding robot for laser ablation of liver tumors under MRI guidance. IEEE ASME Trans Mechatron PP(99):1–14
Elhawary H, Tse ZT, Hamed A, Rea M, Davies BL, Lamperth MU (2008) The case for MR-compatible robotics: a review of the state of the art. Int J Med Robot 4(2):105–113
Cleary K, Melzer A, Watson V, Kronreif G, Stoianovici D (2006) Interventional robotic systems: applications and technology state-of-the-art. Minim Invasive Ther Allied Technol 15(2):101–113
Monfaredi R, Sze R, Safdar N, Sharma K, Cleary K (2013) Patient mounted CT and MRI-compatible shoulder arthrography robot for needle guidance in pediatric interventional procedures. The Hamlyn Symposium on Medical Robotics, London, pp 117–118
Monfaredi R, Seifabadi R, Iordachita I, Sze R, Safdar NM, Sharma K, Fricke S, Krieger A, Cleary K (2014) A prototype body-mounted MRI-compatible robot for needle guidance in shoulder arthrography. In: Proceedings of IEEE RAS & EMBS Int. Conf. Biomedical Robotics and Biomechatronics (BioRob), Sao Paulo, Brazil, pp 40–45
Monfaredi R, Wilson E, Sze R, Sharma K, Azizi B, Iordachita I, Cleary K (2015) Shoulder-mounted robot for MRI-guided arthrography: accuracy and mounting study. In: International Conference of the IEEE Engineering in Medicine and Biology Society, Italy, pp 3643–3646
Churchill E, McConville JE (1976) Sampling and data gathering strategies for future USAF Anthropometry. Webb Associates, Inc. A/F Aerospace Medical Res 2-76, OHIO, AMRL-TR-74-102 1976
National Aeronautics and Space Administraion (2018). https://msis.jsc.nasa.gov/sections/section03.htm
Patricia Rieser (2018) Andorra pediatrics. http://www.andorrapediatrics.com/ap_folders/hand-outs/knowledge/growth.htm
Tokuda J, Song S, Tuncali K, Tempany C, Hata N (2013) Configurable automatic detection and registration of fiducial frames for device to image registration in MRI guided prostate interventions. Med Image Comput Comput Assist Interv 16(03):355–362
Jussila J, Leppaniemi A, Paronen M, Kulomaki E (2005) Ballistic skin simulant. Forensic Sci Int 1(150):63–71
Funding
This work was partially supported by the National Institutes of Health (NIH) under Grants R01EB020003 and R21EB020700.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were IRB-approved and were in accordance with the ethical standards of the institutional and/or national research committee.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Monfaredi, R., Iordachita, I., Wilson, E. et al. Development of a shoulder-mounted robot for MRI-guided needle placement: phantom study. Int J CARS 13, 1829–1841 (2018). https://doi.org/10.1007/s11548-018-1839-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-018-1839-y