
Abstract
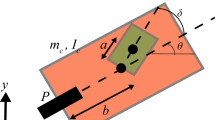
In this paper, we investigate the behavior of an underactuated mixed-dynamic nonholonomic system, a Chaplygin sleigh, subjected to viscous dissipation and sinusoidal forcing. The viscous dissipation is in the allowable directions of motion and preserves the nonholonomic constraint. The inclusion of such dissipative effects produces limit cycle oscillations in a reduced velocity space. We find analytical approximations to such limit cycles and use these to determine sinusoidal inputs to control the speed of the sleigh. We further show small changes to the sinusoidal input can steer the sleigh to any desired direction. Invariant structures like limit cycles can be expected to be seen in the dynamics of other nonholonomic systems when the effects of viscous dissipation are included. The findings we report here are therefore applicable to a broad class of both terrestrial and aquatic locomotion systems with nonholonomic constraints.












Similar content being viewed by others
References
Chaplygin, S.A.: On the theory of motion of nonholonomic systems. The theorem on the reducing multiplier. Math. Sb. 1, 303–314 (1911)
Caratheodory, C.: Der schlitten. J. Appl. Math. Mech. 13, 71–76 (1933)
Neimark, J.I., Fufaev, N.A.: Dynamics of Nonholonomic Systems. AMS, Providence (1972)
Blochm, A.M.: Nonholonomic Mechanics and Control. Springer, Berlin (2003)
Chaplygin, S.A.: On the theory of motion of nonholonomic systems. The reducing-multiplier theorem. Regul. Chaotic Dyn. 13(4), 369–376 (2008)
Ostrowski, J.: Computing reduced equations for robotic systems with constraints and symmetries. IEEE Trans. Robot. Autom. 15(1), 111–123 (1999)
Osborne, J.M., Zenkov, D.V.: Steering the Chaplygin sleigh by a moving mass. In: Proceedings of the American Control Conference (2005)
Kelly, S.D., Fairchild, M.J., Hassing, P.M., Tallapragada, P.: Proportional heading control for planar navigation: the Chaplygin beanie and fishlike robotic swimming. In: Proceedings of the American Control Conference (2012)
Bizyaev, I.A., Borisov, A.V., Mamaev, I.S.: The Chaplygin sleigh with parametric excitation: chaotic dynamics and nonholonomic acceleration. Regul. Chaotic Dyn. 22(8), 955–975 (2017)
Bizyaev, I.A., Borisov, A.V., Kuznetsov, S.P.: Chaplygin sleigh with periodically oscillating internal mass. Europhys. Lett. 119(6), 60008 (2017)
Tallapragada, P., Fedonyuk, V.: Steering a Chaplygin sleigh using periodic impulses. J. Comput. Nonlinear Dyn. 12(5), 054501 (2017)
Borisov, A.V., Mamaev, I.S.: An inhomogeneous Chaplygin sleigh. Regul. Chaotic Dyn. 22(4), 435–447 (2017)
Bizyaev, I.A., Borisov, A.V., Mamaev, I.S.: Dynamics of the Chaplygin sleigh on a cylinder. Regul. Chaotic Dyn. 21(1), 136–146 (2016)
Borisov, A.V., Mamaev, I.S., Bizyaev, I.A.: The Jacobi integral in nonholonomic mechanics. Regul. Chaotic Dyn. 20(3), 383–400 (2015)
Kuznetsov, S.P.: Regular and chaotic motions of the Chaplygin sleigh with periodically switched location of nonholonomic constraint. EPL (Europhys. Lett.) 118(1), 10007 (2017)
Fedonyuk, V., Tallapragada, P.: The stick-slip motion of a Chaplygin sleigh witth a piecewise smooth nonholonomic constraint. In: Proceedings of the ASME DSCC (2015)
Fedonyuk, V., Tallapragada, P.: Stick-slip motion of the chaplygin sleigh with a piecewise smooth nonholonomic constraint. J. Comput. Nonlinear Dyn. 12, 031021 (2017)
Ostrowski, J.: Reduced equations for nonholonomic mechanical systems with dissipative forces. Rep. Math. Phys. 42(1), 185–209 (1998)
Dear, T., Kelly, S.D., Travers, M., Choset, H.: Snakeboard motion planning with viscous friction and skidding. In: Proceedings of IEEE International Conference on Robotics and Automation, pp. 670–675 (2015)
Borisov, A.V., Kuznetsov, S.P.: Regular and chaotic motions of a Chaplygin sleigh under periodic pulsed torque impacts. Regul. Chaotic Dyn. 21(7–8), 792–803 (2016)
Tallapragada, P.: A swimming robot with an internal rotor as a nonholonomic system. In: Proceedings of the American Control Conference (2015)
Tallapragada, P., Kelly, S.D.: Integrability of velocity constraints modeling vortex shedding in ideal fluids. J. Comput. Nonlinear Dyn. 12(2), 021008 (2017)
Pollard, B., Tallapragada, P.: An aquatic robot propelled by an internal rotor. IEEE/ASME Trans. Mechatron. 22(2), 931–939 (2016)
Fedonyuk, V., Tallapragada, P., Wang, Y.: Limit cycle analysis and control of the dissipative Chaplygin sleigh. In: ASME Dynamic Systems and Control Conference (2017)
Ijspeert, A.J.: Central pattern generators for locomotion control in animals and robots: a review. Neural Netw. 21(4), 642–653 (2008)
Murray, R., Sastry, S.S.: Steering nonholonomic systems using sinusoids. In: Proceedings of the 29th Conference of Decision and Control (1990)
Genesio, R., Tesi, A.: Harmonic balance methods for the analysis of chaotic dynamics in nonlinear systems. Automatica 28(3), 531–548 (1992)
Basso, M., Genesio, R., Tesi, A.: A frequency method for predicting limit cycle bifurcations. Nonlinear Dyn. 13(4), 339360 (1997)
Ostrowski, J.: Steering for a class of dynamic nonholonomic systems. IEEE Trans. Autom. Control 45, 14921497 (2000)
Bullo, F., Lewis, A.D.: Kinematic controllability and motion planning for the snakeboard. IEEE Trans. Robot. Autom. 9(3), 494–498 (2003)
Chakon, O., Or, Y.: Analysis of underactuated dynamic locomotion systems using perturbation expansion: the twistcar toy example. J. Nonlinear Sci. 27, 1215–1234 (2017)
Acknowledgements
This paper is based upon work supported by the National Science Foundation under Grant Number CMMI 1563315.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest to report.
Additional information
NSF CMMI Grant 1563315.
Rights and permissions
About this article

Cite this article
Fedonyuk, V., Tallapragada, P. Sinusoidal control and limit cycle analysis of the dissipative Chaplygin sleigh. Nonlinear Dyn 93, 835–846 (2018). https://doi.org/10.1007/s11071-018-4230-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4230-1