
Abstract
2DPalmHash Code (2DPHC) was proposed as a cancelable code for secure palmprint verification. In order to relieve the vertical and horizontal dislocation problems, palmprint codes, including 2DPHC, need to be shifted both in horizontal and vertical directions and matched repeatedly, which leads to high computational complexity. However, according to our analysis, horizontal-shift matching can be ignored. Therefore, the multiple-shift matching of 2DPHC can be greatly simplified. Simplified 2DPHC (S2DPHC) has three-fold advantages: (1) reduces matching complexity; (2) enhances changeability performance; (3) improves verification performance. Furthermore, the superiorities of S2DPHC over 2DPHC in terms of changeability and verification performances are validated via rigorously analysis and extensive experimentation.
Similar content being viewed by others


1 Introduction
Palmprint biometric has been widely employed recently thanks to its high accuracy, low cost and wide user acceptance [6, 23, 37]. Ratha et al. summarized eight vulnerable security issues of general biometric systems [24], which also affect palmprint biometric system without exception. Palmprint template protection requires immediate attention due to the following concerns:
-
Palmprint features are immutable, revocation is deemed impossible when a palmprint template is compromised.
-
Users’ palmprint templates may be stored and shared across various databases. If one user’s palmprint template is stolen, his or her templates stored in other databases are no longer secure.
-
It is likely that users’ private data, such as gene defects, diseases, are leaked from the unprotected palmprint template.
Biometric template protection schemes need to be designed carefully according to the following four criteria for maximal security and privacy protection [9]:
-
Diversity
Many independent templates should be generated from a single biometric feature and stored in different databases. The diversity ensures the non-linkability, and hence avoids cross-matching across diversified databases.
-
Revocability/Reusability
When a protected biometric template is compromised, the previous template can be revoked and a new one can be reissued.
-
Non-invertibility
The scheme should be non-invertible to prevent the restoration of original features. Non-invertibility ensures the privacy of biometric data.
-
Accuracy Performance
The accuracy performance of protected template should be comparable to its original counterpart.
In fact, diversity and revocability/reusability can be collectively called “changeability”. By far, it is a great challenge to meet all the requirements simultaneously.
1.1 Cancelable palmprint
Cancelable biometric template, as a protected biometric template, refers to the distorted version of original biometric feature, which can be updated like a password [29]. Existing cancelable palmprint schemes can be briefly categorized into invertible and non-invertible methods.
-
(1)
Invertible methods
In these approaches, palmprint features are encrypted for protection. Kong et al. introduced random field shift to Gabor filter orientation so that the resulting random orientation filter bank can generate changeable codes [15]. According to [17], the protection mechanism of random field shift is equivalent to encryption. Another typical instance of invertible cancelable palmprint approach was proposed in [22], whereby palmprint templates were directly encrypted via chaotic stream cipher. Despite invertible cancelable palmprint does not weaken verification performance, encryption and decryption are mutual invertible processes. Thus the encrypted palmprint templates are decryptable, which fails to meet non-invertible property.
-
(2)
Non-invertible methods
The early work of non-invertible cancelable palmprint template coined PalmHashing was proposed by [5], which is similar to BioHashing proposed in [30, 31]. Both BioHashing and PalmHashing employ random projection (RP) to fuse biometric features and a set of pseudo-random number (PRN). The PRN are generated with users’ tokens (or passwords, keys, seeds). RP is a powerful method for dimensionality reduction and can preserve the pairwise distances between vectors in low-dimensional space [1, 2, 11]. The fusion results are then thresholded to generate cancelable codes.
However, Kong, Cheung and Zhang pointed out that the good performance of BioHashing and its variants, including PalmHashing, is based on the assumption that users’ tokens have never been stolen [3, 4, 12], an incident called the worst or stolen-token scenario. Unfortunately, this assumption is not always hold in practice [27].
Another major approach for non-invertible cancelable palmprint is binary cancelable palmprint coding. Binary coding expresses biometric features as a bit string. In general, binary coding saves computation/storage cost and has favorable verification performance in large databases [7, 10, 13, 14, 21, 25, 35, 36]. Thus it is tempted to develop cancelable palmprint template via coding approach.
Leng et al. randomized parameters of Gabor filters by PRN to generate randomized PalmCodes [20]. However, there is a correlation between two randomized PalmCodes when their perturbations are similar. Moreover, its verification performance is less attractive.
Two cancelable palmprint coding schemes, namely 2DPalmPhasor Code (2DPPC) [19] and 2DPalmHash Code (2DPHC) [18], were proposed recently. For both schemes, changeability is realized by updating the users’ tokens. Non-invertibility is ensured by means of non-invertible projections, that is 2DHash projection for 2DPHC and 2DPhasor projection for 2DPPC. The verification performances of both 2DPHC and 2DPPC are satisfactory thanks to two effective procedures, score level mean rule fusion and transposition operation of Gabor response matrix at vertical orientation. However, 2DPHC requires less computational cost than 2DPPC, and has been extended to palmvein template protection [16].
1.2 Motivations and contributions
Although coding schemes have been prominent and widely applied as feature representation techniques for palmprint biometric [8], they are prone to template misalignment problem during matching [26]. To response to this issue, multi-shifted matching, in which one template is horizontally and vertically shifted and matched with another one repeatedly, is used to remedy this problem [7, 10, 13, 14, 21, 25, 35, 36]. However, this additional mechanism decelerates the matching speed.
Without exception, both 2DPPC and 2DPHC inherit the same problem. This paper shows the possibility to reduce the matching complexity of 2DPHC by discarding the ineffective horizontally shifted matchings. This could be of inspiration to other coding-based cancelable palmprint design.
On the other hand, all the cancelable biometric schemes, which employ user-specific-token to enable changeability, are required to undergo rigorous accuracy performance and changeability analysis for practical deployment. For accuracy performance, two scenarios should be considered. In the worst scenario or so called stolen-token scenario, all cancelable templates are generated with the same token; on the other hand, in the best scenario, aka specific-token scenario, one user’s cancelable template is generated with his/her specific token. Although a number of literatures have reported some initial works [28, 32–34], a generalized analysis of cancelable biometrics based on user-specific-token has not been reported thus far.
Based on the above two motivations, the contributions of this paper are as follows:
-
(1)
Our analysis reveals that horizontally-shifted matching can be abandoned to reduce the complexity of existing matching paradigm for coded palmprint template. Simplified 2DPHC (S2DPHC) for secure palmprint verification is proposed, which does not only reduce matching complexity, but also improves both changeability and verification performances.
-
(2)
A unified analytic framework is established, in which the changeability and verification performances are systematically evaluated through the separation between the matching score distributions in four cases. The details of the four cases will be introduced in Section 3.1. In light of unified analytic framework, the changeability and verification performances of 2DPHC and S2DPHC are analyzed and compared, which validates the preferable advantages of S2DPHC.
To avoid confusion, the matching scores in this paper refer to the dissimilarity between biometric templates. For simplicity, all the distributions in sequel refer to matching score distributions.
The rest of this paper is organized as follows: Section 2 revisits 2DPHC, analyzes the effects of horizontal and vertical shifts on matching, and then proposes S2DPHC. Section 3 and Section 4 systematically analyzes the changeability and verification performances of 2DPHC and S2DPHC, respectively. Section 5 elaborates the experimental results and discussions. Finally Section 6 draws the conclusions.
2 Simplified 2DPalmHash code
2.1 2DPalmHash code revisit
Figure 1 shows the operational flow of 2DPHC generation and each step is detailed as follows.

2DPHC generation procedure
-
Step 1
I denotes the region of interest of a palmprint image. Normalize the mean and variance of I by:
$$ {\mathbf{J}}_{i,j}=\operatorname{sgn}\left({\mathbf{I}}_{i,j}-E\left({\mathbf{I}}_{i,j}\right)\right)\sqrt{\frac{10\times {\left[{\mathbf{I}}_{i,j}-E\left({\mathbf{I}}_{i,j}\right)\right]}^2}{Var\left({\mathbf{I}}_{i,j}\right)}} $$(1)where 1 ≤ i, j ≤ 128. sgn(·), E(·) and Var(·) refer to sign, expectation and variance, respectively. I i,j and J i,j denote the entries in the i-th row and j-th column of I and J, respectively. Filter J with a Gaussian filter whose size is 5 × 5 and standard deviation is 0.002.
-
Step 2
Generate a circular Gabor filter with orientation θ τ ∈ [0,π) as:
$$ {\mathbf{G}}^{\tau}\left(x,y,{\theta}_{\tau },u,\sigma \right)=\frac{1}{2\pi {\sigma}^2} \exp \left\{-\frac{x^2+{y}^2}{2{\sigma}^2}\right\} \exp \left\{2\pi \sqrt{-1}\left(ux \cos {\theta}_{\tau }+uy \sin {\theta}_{\tau}\right)\right\} $$(2)u denotes the frequency of the sinusoidal wave, σ denotes the standard deviation of the Gaussian envelope.
$$ {\theta}_{\tau }=\frac{\left(\tau -1\right)\pi }{L} $$(3)1 ≤ τ ≤ L. L and τ denote the number of θ τ and the τ-th θ τ , respectively. To suppress illumination disturbance, the mean of discrete Gabor filter is subtracted by:
$$ {\overline{\mathbf{G}}}^{\tau}\left(x,y,{\theta}_{\tau },u,\sigma \right)={\mathbf{G}}^{\tau}\left(x,y,{\theta}_{\tau },u,\sigma \right)-\frac{{\displaystyle \sum_{i=-n}^n{\displaystyle \sum_{j=-n}^n{\mathbf{G}}^{\tau}\left(i,j,{\theta}_{\tau },u,\sigma \right)}}}{{\left(2n+1\right)}^2} $$(4)(2n + 1)2 is the size of Gabor filter.
-
Step 3
J is filtered with Gabor filter \( {\overline{\mathbf{G}}}^{\tau } \) yields Gabor response Ā τ.
$$ {\overline{\mathbf{A}}}^{\tau }=\mathbf{J}*{\overline{\mathbf{G}}}^{\tau } $$(5)* denotes convolution operation. A R τ and A I τ are the uniformly down-sampled real part and imaginary part of Ā τ, respectively, whose sizes are both T × T, T = 32.
$$ {\mathbf{A}}^{\tau }=\left[{A_R}^{\tau }{A_I}^{\tau}\right] $$(6) -
Step 4
If θ τ = π/2, A R τ and A I τ are transposed, respectively. A τ is reconstituted by:
$$ {\mathbf{A}}^{\tau }=\left[{\left({A_R}^{\tau}\right)}^{\mathbf{T}}{\left({A_I}^{\tau}\right)}^{\mathbf{T}}\right] $$(7) -
Step 5
A random matrix R following standard normal distribution with size 2 T × T is generated with a token. Since the columns of R are approximatively orthogonal vectors [2, 34], orthogonalization is not executed to save computational cost.
-
Step 6
2DHash projection of A τ is M τ. m τ i,j is the entry of M τ:
$$ {m}_{i,j}^{\tau }={\displaystyle \sum_{k=1}^{2T}{a}_{i,k}^{\tau }{r}_{j,k}} $$(8)where a τ i,k and r j,k are the entries of A τ and R, respectively.
-
Step 7
Generate 2DPHC by:
$$ m{\mathrm{b}}_{i,j}^{\tau }=\operatorname{step}\left({m}_{i,j}^{\tau}\right) $$(9)step(·) refers to unit step function.
-
Step 8
Let Mbτ and Nbτ be enrolled 2DPHC and query 2DPHC, respectively. The dissimilarity between Mbτ and Nbτ can be measured by Hamming distance:
$$ {\operatorname{H}}_{v,h}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)={\displaystyle \sum_{i=V+1}^{T-V}{\displaystyle \sum_{j=H+1}^{T-H}m{\mathrm{b}}_{i,j}^{\tau}\oplus n{\mathrm{b}}_{i+v,j+h}^{\tau }}} $$(10)⊗ is bitwise XOR operation. The normalized Hamming distance is:
$$ {d}_{v,h}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)=\frac{{\operatorname{H}}_{v,h}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)}{\left(T-2H\right)\left(T-2V\right)} $$(11)It is noted that coding approaches are sensitive to shift and rotation. To remedy the dislocation problem due to imperfect preprocessing, one 2DPHC is vertically and horizontally shifted by v unit(s) and h unit(s), respectively, and matched with another 2DPHC, repeatedly.
We set |v| ≤ V = 2, |h| ≤ H = 2. Thus every pair of 2DPHCs are matched repeatedly for (2 V + 1) × (2H + 1) times. The final matching score is the minimum normalized Hamming distance.
$$ {d}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)= \min \left[{d}_{v,h}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)\right] $$(12) -
Step 9
Let MT = [Mb1, Mb2, …, MbL] and NT = [Nb1, Nb2, …, NbL]. Mean rule fuses d(Mbτ,Nbτ) at score level to obtain the dissimilarity between MT and NT by:
$$ {d}_F\left(\mathbf{M}\mathbf{T},\mathbf{N}\mathbf{T}\right)=\frac{1}{L}{\displaystyle \sum_{\tau =1}^L{d}^{\tau}\left(\mathbf{M}{\mathrm{b}}^{\tau },\mathbf{N}{\mathrm{b}}^{\tau}\right)} $$(13)
2.2 Effects of multiple shifts on matching
-
(1)
Vertical Shift
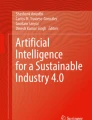
Let the enrolled and query Gabor response matrices be A τ and A ' τ. The spatial relation between A τ and A ' τ with vertical dislocation is depicted in Fig. 2 assuming that a τ i,j ≈ a' τ i,j .
Fig. 2 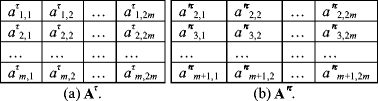
Spatial relation between A τ and A ' τ with vertical dislocation
If A ' τ is shifted downward one unit, A τ and the shifted A ' τ are aligned. As described in Step 6 in Section 2.1. Since a τ i,j ≈ a' τ i,j , \( {m}_{i+1,j}^{\tau }={\displaystyle \sum_{k=1}^{2m}{a}_{i+1,k}^{\tau }{r}_{j,k}}\approx {m^{\prime}}_{i,j}^{\tau }={\displaystyle \sum_{k=1}^{2m}{a^{\prime}}_{i+1,k}^{\tau }{r}_{j,k}} \), which implies that, if M ' τ is shifted downward one unit, M τ and the shifted M ' τ are aligned. This suggests that vertical shift is capable fixing the vertical dislocation in 2DPHC matching.
-
(2)
Horizontal Shift
Follow the notations above, the spatial relation between A τ and A ' τ with horizontal dislocation is depicted in Fig. 3 assuming that a τ i,j ≈ a' τ i,j .
Fig. 3 
Spatial relation between A τ and A ' τ with horizontal dislocation
Similarly, if A ' τ is shifted rightward one unit, A τ and the shifted A ' τ are aligned. In spite of a τ i,j ≈ a' τ i,j ; however r j+1,k ≠ r j,k , so a τ i,k r j + 1,k ≠ a′ τ i,k + 1 r j,k , then \( {m}_{i,j+1}^{\tau }={\displaystyle \sum_{k=1}^{2m}{a}_{i,k}^{\tau }{r}_{j+1,k}}\ne {m^{\prime}}_{i,j}^{\tau }={\displaystyle \sum_{k=1}^{2m}{a^{\prime}}_{i,k+1}^{\tau }{r}_{j,k}} \), which implies that horizontal shift is incapable to resolve the dislocation matching between M τ and M ' τ . Therefore horizontal shift can be abandoned in 2DPHC matching.


2.3 Simplified 2DPalmHash code (S2DPHC)
According to the analysis above, horizontal shift is discarded, and hence matching procedure of 2DPHC, Eq.(10) ~ Eq.(12), are modified as:
Although the modification seems minor, it leads to a number of significant merits, i.e., matching complexity reduction, changeability enhancement and verification performance improvement. The matching complexity of S2DPHC is only 1/5 of that of 2DPHC. The enhanced changeability performance and improved verification performance will be detained with the analysis in Section 4 and the experiments in Section 5.
3 Performance analysis of 2DPalmHash code
This section validates the changeability and verification performances of 2DPHC through a systematic analysis.
3.1 Case categories and notations
The verification performance is commonly represented by false accept rate (FAR) and false reject rate (FRR). FAR and FRR are related by the separation of genuine and impostor distributions. Small overlap between genuine and impostor distributions indicates low FAR and FRR; and vice versa. Thus the genuine and impostor matching scores are used to analyze the verification performance.
Changeability requires a large number of independent templates of the same biometric to be created with diverse tokens, and then cancelable templates can be updated. In template-updating scenario, FAR is measured by the probability of that cancelable template fails to be updated, i.e., the probability of that the dissimilarity score between the new and the previous templates is less than a preset threshold, so here FAR is replaced with failure update rate (FUR) for better clarity. FUR and FRR are related by the separation of genuine and pseudo-impostor distributions. Here the pseudo-impostor matching score is the dissimilarity score between the 2DPHCs of the same biometric generated with different tokens.
To facilitate the analysis on the matching score distributions, according to whether the biometric features are of the same class and whether the tokenized random matrices are generated with the same token, four cases are considered as shown in Table 1.
-
Case 1
The genuine matching scores in the worst, the best and template updating scenarios are computed.
-
Case 2
The distances between the cancelable templates of the same class, which are generated with different tokens, evaluate the changeability performance when compared with the matching scores in Case (1).
-
Case 3
The impostor matching scores in the worst scenario are computed by the distances between the cancelable templates of different classes, which are generated with same token. Combined with the matching scores in Case (1), the verification performance in stolen-token scenario can be determined.
-
Case 4
The impostor matching scores in the best scenario are computed by the distances between the cancelable templates of different classes, which are generated with different tokens. Therefore, the verification performance in specific-token scenario can be determined together with Case (1).
Figure 4 shows the distribution separation between the matching scores in three scenarios. Table 2 lists the notations used in the following analysis. The experimental results in Section 5.2 will confirm the validity of the theoretical analysis in Sections 3.2 and 3.3.

Distribution separation between Case 1 and the other three cases. a Template-updating scenario. b Worst scenario. c Best scenario
3.2 Properties
The proofs of the properties are given in Appendix.
Property 1
Let X, Y be two independent random variables. The probability density function (PDF) of Y is an even function, and the PDF of X is an arbitrary function. For Z = XY, the PDF of Z is also an even function.
Property 2
Let X, Y be two independent random variables, whose PDF are both even functions. For Z = X + Y, the PDF of Z is also an even function.
3.3 Matching score distribution analysis
The changeability performance relies on the separation between the distributions in Case (1) and Case (2). In the worst scenario, the verification performance relies on the separation between the distributions in Case (1) and Case (3); while in the best scenario, it relies on the separation between the distributions in Case (1) and Case (4). The distributions in four cases are analyzed as follows.
3.3.1 Case 1: same class, same token
PalmCode [35], a coded palmprint template and unprotected counterpart of 2DPHC, is used as a baseline method for comparison.
Let A and B be two Gabor response matrices of the same class that are tuned to identical orientation. a i (a i,j j-th entry) and b i (b i,j j-th entry) are the i-th row vectors of A and B, respectively. The distribution of the dissimilarity score (normalized Hamming distance) between A and B is the genuine distribution.
Mb and Nb are two 2DPHCs generated from A and B. Then
mb i,j and nb i,j are the i-th row and j-th column entries of Mb and Nb, respectively.
On the other hand, Ab and Bb are two PalmCodes generated from A and B such as
ab i,j and bb i,j are the i-th row and j-th column entries of Ab and Bb. Assume that A and B are aligned, the Hamming distance between Ab and Bb is:
Since Mb and Nb are the cancelable templates generated from A and B, H(Ab,Bb) serves as a reference score with respect to the Hamming distance between Mb and Nb, H(Mb,Nb). The following analysis will justify that H(Ab,Bb) and H(Mb,Nb) are positively tied.
Figure 5 shows the analysis route. “+”, “–” and “=” in the circles indicate that the two variables linked by the arrows are positively tied, negatively tied and equal, respectively.

Analysis route
First, it is noted that H(Mb,Nb) increases when there is a mismatch between mb i,j and nb i,j , which is attributed to
It can be restated as the probability increment of mismatch, i.e., Pr(mb i,j ≠ nb i,j ). On the contrary, the matching of mb i,j and nb i,j leads to decrement of Pr(mb i,j ≠ nb i,j )
Since Pr(mb i,j ⊗ nb i,j = 0) = 1 − Pr(mb i,j ⊗ nb i,j = 1), it is sufficient to analyze either one. Pr(mb i,j ⊗ nb i,j = 0) and Pr(ab i,j ⊗ bb i,j = 0) are chosen, which are negatively tied with H(Mb,Nb) and H(Ab,Bb), respectively.
By referring to Eq.(18) and Eq.(21), if m i,j n i,j ≥ 0, mb i,j ⊗ nb i,j = 0. Therefore, Pr(mb i,j ⊗ nb i,j = 0) can be re-expressed with Pr(m i,j n i,j ≥ 0). The same goes to Pr(ab i,j ⊗ bb i,j = 0) =Pr(a i,j b i,j ≥ 0).
Next, we show that Pr(m i,j n i,j ≥ 0) is determined by the product of m i,j and n i,j defined in Eq.(17), whereby
The two items of m i,j n i,j in Eq.(22) are analyzed as follows.
-
(a)
The first term \( {\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1\left(q\ne p\right)}^{2T}{a}_{i,p}{r}_{j,p}{b}_{i,q}{r}_{j,q}}} \) in Eq.(22)
Since r j,p obeys standard normal distribution, the PDF of r j,p is an even function. On the other hand, since r j,p and a i,p are mutually independent, the PDF of a i,p r j,p is also an even function followed by Property 1. The same goes to the PDF of b i,q r j,q .
If p ≠ q, a i,p r j,p and b i,q r j,q are mutually independent. From Property 1 and Property 2, if p ≠ q, the PDFs of a i,p r j,p b i,q r j,q and \( {\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1\left(q\ne p\right)}^{2T}{a}_{i,p}{r}_{j,p}{b}_{i,q}{r}_{j,q}}} \) are both even functions. Hence \( \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1\left(q\ne p\right)}^{2T}{a}_{i,p}{r}_{j,p}{b}_{i,q}{r}_{j,q}}}\ge 0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1\left(q\ne p\right)}^{2T}{a}_{i,p}{r}_{j,p}{b}_{i,q}{r}_{j,q}}}<0\right)=0.5 \).
This implies that \( {\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1\left(q\ne p\right)}^{2T}{a}_{i,p}{r}_{j,p}{b}_{i,q}{r}_{j,q}}} \) would not affect the sign of m i,j n i,j .
-
(b)
The second item \( {\displaystyle \sum_{k=1}^{2T}{a}_{i,k}{r}_{j,k}{b}_{i,k}{r}_{j,k}} \) in Eq.(22)
As Pr(r 2 j,k ≥ 0) = 1, a i,k b i,k r 2 j,k ≥ 0 if a i,k b i,k ≥ 0. Thus, if a i,k b i,k ≥ 0, a i,k b i,k r 2 j,k is definitely a positive term of m i,j n i,j . Therefore, high Pr(a i,j b i,j ≥ 0) indicates that more positive terms appear in the expression of m i,j n i,j . Simply speaking, followed by the increasing of Pr(a i,j b i,j ≥ 0), Pr(m i,j n i,j ≥ 0) increases but H(Mb,Nb) decreases.
On the other hand, high Pr(a i,j b i,j ≥ 0) echoes that more positive terms appear in the expression of a i,j b i,j . This implies that Pr(a i,j b i,j ≥ 0) and H(Ab,Bb) are negatively tied.
From the above analysis, both H(Mb,Nb) and H(Ab,Bb) are negatively tied to Pr(a i,j b i,j ≥ 0), so H(Mb,Nb) and H(Ab,Bb) are positively tied.
As a remark for the analysis of Case (1), H(Mb,Nb) and H(Ab,Bb) are positively tied. If the intra-class variances, which can be quantified by the genuine matching scores of PalmCodes, are small, then the matching scores of 2DPHC in Case (1) are also small.
3.3.2 Case 2: same class, different tokens
Assume that two PRN matrices R A and R B are generated with two different tokens. The definitions of the other variables in Case (2) are the same as those in Case (1). Then
Pr(m i,j n i,j ≥ 0) is determined by the product of m i,j and n i,j defined in Eq.(23), whereby
We learn that the PDF of a i,p r A j,p and b i,q r B j,q are both even functions. Since r A j,p and r B j,q are mutually independent, a i,p r A j,p and b i,q r B j,q follow the same. According to Property 1 and Property 2, the PDF of a i,p r A j,p b i,q r B j,q and \( {\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{b}_{i,q}{r}_{j,q}^B}} \) are even functions.
Thus \( \begin{array}{l} \Pr \left({m}_{i,j}{n}_{i,j}\ge 0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{a}_{i,p}{r}_{j,p}^A}{\displaystyle \sum_{q=1}^{2T}{b}_{i,q}{r}_{j,q}^B}\ge 0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{b}_{i,q}{r}_{j,q}^B}}\ge 0\right)\\ {}= \Pr \left({m}_{i,j}{n}_{i,j}<0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{a}_{i,p}{r}_{j,p}^A}{\displaystyle \sum_{q=1}^{2T}{b}_{i,q}{r}_{j,q}^B}<0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{b}_{i,q}{r}_{j,q}^B}}<0\right)=0.5\end{array} \).
This indicates that H(Mb,Nb) in Case (2) obeys binomial distribution, H(Mb,Nb) ~ Bin(T 2,0.5), where T 2 is the size of the part of 2DPHC for matching. If with no shifting, then
k = 0,1,…,(T)2, where the expectation and variance of H(Mb,Nb) can be easily derived as:
Consequently, it can infer that
Consequently, the expectation and the variance of normalized Hamming distance distribution are:
Compared with the analysis on H(Mb,Nb) in Case (1), Eq.(29) and Eq.(30) confirm that the matching scores in Case (2) are larger, which ensures the changeability performance, i.e., the well separation between the distributions of Case (1) and Case (2).
3.3.3 Case 3: different classes, same token
Let A and C be Gabor responses of two different classes with identical orientation. a i and c i are the i-th row vectors of A and C, respectively. a i,j and c i,j are the j-th entries of a i and c i , respectively. The definitions of the other variables in Case (3) are the same as those in Case (1). Then
According to the results in Case (1), H(Mb,Nb) and H(Ab,Bb) are positively tied. Thus, if the inter-class variances, which can be quantified by the impostor matching scores of PalmCodes, are large, then the matching scores of 2DPHC in Case (3) are also large.
3.3.4 Case 4: different classes, different tokens
Assume that two PRN matrices R A and R C are generated with two different tokens. The definitions of A and C in Case (4) are the same as those in Case (3). The definitions of the other variables in Case (4) are like as those in Case (1). Then
Pr(m i,j n i,j ≥ 0) is determined by the product of m i,j and n i,j defined in Eq.(32), whereby
Similar to the analysis of Case (2), the PDF of \( {\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{c}_{i,q}{r}_{j,q}^C}} \) is an even function.
Thus \( \begin{array}{l} \Pr \left({m}_{i,j}{n}_{i,j}\ge 0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{a}_{i,p}{r}_{j,p}^A}{\displaystyle \sum_{q=1}^{2T}{c}_{i,q}{r}_{j,q}^C}\ge 0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{c}_{i,q}{r}_{j,q}^C}}\ge 0\right)\\ {}= \Pr \left({m}_{i,j}{n}_{i,j}<0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{a}_{i,p}{r}_{j,p}^A}{\displaystyle \sum_{q=1}^{2T}{c}_{i,q}{r}_{j,q}^C}<0\right)= \Pr \left({\displaystyle \sum_{p=1}^{2T}{\displaystyle \sum_{q=1}^{2T}{a}_{i,p}{r}_{j,p}^A{c}_{i,q}{r}_{j,q}^C}}<0\right)=0.5\end{array} \).
Therefore, H(Mb,Nb) in Case (4) obeys binomial distribution as well, H(Mb,Nb) ~ Bin(T 2,0.5), where T 2 is the size of the part of 2DPHC for matching without shifting.
The same remark can be drawn that the matching scores in Case (4) are larger than those in Case (1), which ensures the verification performance in the best scenario, i.e., the well separation between the distributions of Case (1) and Case (4).
3.4 Effect of shift matching on distributions
This subsection devotes to analyze the effect of shift matching on the matching score distributions.
We set V = 2, H = 2, so the size of 2DPHC for matching in Eq.(10) is reduced to (T–2 V)(T–2H) = (T–4)2. The final matching score is the minimum normalized matching score of 25 shifted matchings.
Shifting relieves the dislocation problem of genuine matchings in Case (1), which reduces genuine matchings scores obviously.
In Case (3), since the final matching score is the minimum score of 25 shift matchings, the impostor matching score in the worst scenario would be reduced. Since the features are generated from different classes, the reduction in Case (3) is less than that in Case (1).
In Case (2) and Case (4), since Pr(m i,j n i,j ≥ 0) = Pr(m i,j n i,j < 0) = 0.5, H v,h (Mb,Nb) obeys binomial distribution, H v,h (Mb,Nb) ~ Bin((T–4)2,0.5), then
k = 0,1,…,(T–4)2. F H (z), the cumulative distribution function (CDF) of H v,h (Mb,Nb), can be derived from Eq.(35) as:
Thus \( {F}_d\left(\frac{z}{{\left(T-4\right)}^2}\right) \), the CDF of d(Mb,Nb) in Eq.(34), is:
Hence,
z = 0,1,…,(T–4)2.
Based on Eq.(38), the expectation and variance of d(Mb,Nb) in Eq.(34) can be inferred as:
The distribution of Eq.(38) confirms that the matching scores with shift in Case (2) and Case (4) still remain larger than those in Case (1), which ensures the changeability performance in template-updating scenario and the verification performance in the best scenario.
4 Performance analysis of simplified 2DPalmHash code
In this section, the effects of simplification on the matching score distribution models are analyzed. The comparison with the models in Section 3.4 validates the preferable changeability and verification performances of S2DPHC.
Similar to 2DPHC, the changeability and verification performances of S2DPHC rely on the separation between the distributions of Case (1) and the other three cases. Although simplified matching enlarges the matching scores in all four cases, the enlargement in Case (1) is less obvious than that in the other three cases, so S2DPHC has better changeability and verification performances than 2DPHC. The confirmation analysis is elaborated as follows.
4.1 Case 1: same class, same token
Since horizontal shift is trivial, the effect of horizontal shift removal is negligible. Therefore, the matching scores of 2DPHC and S2DPHC in Case (1) are similar.
4.2 Case 3: different classes, same token
Since two 2DPHCs are generated from different classes, it is pointless to align them by multiple-shift matching.
According to the definitions of d v,h (Mb, Nb) in Eq.(11) and d v (Mb, Nb) in Eq.(15),
Eq.(12) and Eq.(16) show that d(Mb, Nb) = min[d v,h (Mb, Nb)], d S(Mb, Nb) = min[d v (Mb, Nb)], which can easily infer that:
Thus the matching scores in Case (3) are enlarged.
4.3 Case 2: same class, different tokens & case 4: different classes, different tokens
We set V = 2, H = 2, so the size of the part of S2DPHC for matching in Eq.(14) is reduced to (T–2 V)(T–2H) = (T–4)2.
Since Pr(m i,j n i,j ≥ 0) = Pr(m i,j n i,j < 0) = 0.5, H v (Mb,Nb) obeys binomial distribution, H v (Mb,Nb) ~ Bin((T–4)2,0.5), then
k = 0,1,…,(T–4)2. F S H (z), the CDF of H v (Mb,Nb), can be derived from Eq.(44) as:
Thus \( {F}_d^S\left(\frac{z}{{\left(T-4\right)}^2}\right) \), the CDF of d S(Mb,Nb) in Eq.(43), is:
Hence,
z = 0,1,…,(T–4)2.
Based on Eq.(47), the expectation and variance of d S(Mb,Nb) can be inferred as:
The distribution of d S(Mb,Nb) in Eq.(47), shown in Fig. 6, confirms that the matching scores of S2DPHC in Case (2) and Case (4) remain large, which ensures the changeability performance in template-updating scenario and the verification performance in the best scenario.

Theoretical distributions of d(Mb,Nb) and d S(Mb,Nb)
According to the comparison of distributions of d(Mb,Nb) in Eq.(38) and d S(Mb,Nb) in Eq.(47), both shown in Fig. 6, the matching scores are enlarged by matching simplification, which ensures that S2DPHC outperform 2DPHC in Case (2) and Case (4).
5 Experimental results and discussions
5.1 Experimental setup
All the experiments are implemented with MATLAB 7.14 and run on a PC with Inter (R) Core (TM) i5-3570 CPU and 4GB RAM. PolyU Palmprint Database Version II (http://www4.comp.polyu.edu.hk/~biometrics) is used in the experiments. This database contains 7,752 gray scale palmprint samples of 386 palms of 193 individuals.
The numbers of genuine and imposter matching are 74,068 and 29,968,808, respectively. In template-updating scenario, the pseudo-imposter matching score is the distance between the 2DPHCs of the same class with different tokens. Each sample generates one 2DPHC with its specific token, so the number of pseudo-impostor matching is identical to that of genuine matching, i.e., 74,068. The changeability and verification performances of 2DPHC and S2DPHC are evaluated to confirm the analysis presented in this paper. The non-invertibility of 2DPHC was discussed in [18].
5.2 Distributions in four cases
The experimental results in this subsection are coincident to the theoretical analysis in Sections 3.2 and 3.3.
We opt L = 4 for instance, i.e., θ 1 = 0, θ 2 = π/4, θ 3 = π/2 and θ 4 = 3π/4. Table 3 tabulates the means and standard deviations of the score distributions of 2DPHC matching without shifting, and Fig. 7 shows the corresponding score distributions.

Score distributions of 2DPHC matching without shifting. a Case 1: Genuine matching b Case 2: Pseudo-impostor matching. c Case 3: Impostor matching (worst scenario). d Case 4: Impostor matching (best scenario)
The score distributions of pseudo-impostor matching in Case (2) and impostor matching (best scenario) in Case (4) coincide with the theoretical distribution model in Eq.(28) with T = 32. The means and standard deviations are about 0.50 and 0.02, respectively, which coincide with the theoretical values depicted in Eq.(29) and Eq.(30), respectively.
Furthermore, it is observed from Table 3 that the score distributions in Case (1), whose means and standard deviations are about 0.30 and 0.11, respectively, and those in the other three cases, whose mean ± std are about 0.50 ± 0.02 or 0.50 ± 0.03, are not well separated. For visual clarity, the score distributions are plotted in Fig. 7. Most matching scores in Fig. 7b, d fall into the range of [0.4,0.6]. However, as shown in Fig. 7a, a considerable proportion of scores are also distributed in [0.4,0.6]. Therefore, it can be observed that there are overlaps between the score distributions in Fig. 7a and those in Fig. 7b, d. The considerable overlaps illustrate palmprint coding approaches are sensitive to shifting and rotation. Thus multiple-shifted matching is necessary to relieve the dislocation problem.
Table 4 tabulates the means and standard deviations of the score distributions of 2DPHC matching with shifting, and Fig. 8 shows the corresponding score distributions.

Score distributions of 2DPHC matching with shifting. a Case 1: Genuine matching. b Case 2: Pseudo-impostor matching. c Case 3: Impostor matching (worst scenario). d Case 4: Impostor matching (best scenario)
The score distributions of pseudo-impostor matching in Case (2) and impostor matching (best scenario) in Case (4) coincide with the theoretical distribution model in Eq.(38) with T = 32. The mean and standard deviation are about 0.46 and 0.01, which coincide with the theoretical values depicted in Eq.(39) and Eq.(40).
Furthermore, it is observed from Table 4 that the mean ± std of score distributions in Case (1) are about 0.25 ± 0.07, and those in the other three cases are about 0.46 ± 0.01 or 0.46 ± 0.02. For visual clarity, the score distributions are also plotted in Fig. 8. The majority of the matching scores in Fig. 8b, d fall into the range of [0.4,0.5]. In contrast, as shown in Fig. 8a, a small proportion of scores are distributed in this range. Therefore, the overlaps between the score distributions in Fig. 8a and those in Fig. 8b, d are small. The small overlaps illustrate multiple-shifted matching is effective to relieve dislocation problem of 2DPHC.
The palmprint features of different classes do not rigorously obey theoretical independence; while the random matrices are theoretically independent. Thus the mean ± std in Case (3) shown in Fig. 8c are about 0.46 ± 0.02. However, the score distributions in Case (3) are still larger than those in Case (1) shown in Fig. 8a, i.e., about 0.25 ± 0.07. Although the separations between the distributions in Case (1) and Case (3) are not as large as those between the distributions in Case (1) and Case (2) or (4), the overlaps between the distributions in Case (1) and Case (3) are still small, which ensures the verification performance in the worst scenario.
Similarly, Table 5 tabulates the means and standard deviations of the score distributions of S2DPHC, and Fig. 9 shows the corresponding score distributions.

Score distributions of S2DPHC matching. a Case 1: Genuine matching. b Case 2: Pseudo-impostor matching. c Case 3: Impostor matching (worst scenario). d Case 4: Impostor matching (best scenario)
The score distributions of pseudo-impostor matching in Case (2) and impostor matching (best scenario) in Case (4) coincide with the theoretical distribution model in Eq.(47) with T = 32. The mean and standard deviation are about 0.48 and 0.01, respectively, which coincide with the theoretical values depicted in Eq.(48) and Eq.(49), respectively. Similar to the discussions of Table 4 and Fig. 8, S2DPHC has also favorable changeability and verification performances.
5.3 Changeability and verification
According to the comparison between Table 4 and Table 5, Figs. 8 and 9, the standard deviations of 2DPHC and S2DPHC are similar. With simplified matching scheme, the means in Case (1) are approximately preserved; the means in Case (3) are enlarged slightly; in contrast, the means in Case (2) and Case (4) are enlarged obviously. Thus the verification performances in the best and worst cases are both improved. Besides, the changeability performance is also enhanced.
Here L = 4 to show the advantages of S2DPHC. The experiments with other L can obtain similar results. Equal error rate (EER) is employed to evaluate the changeability and verification performances improved by matching simplification. Table 6 compares EER of 2DPHC (without and with multi-shifted matching) and S2DPHC, which confirms the superiorities of S2DPHC over 2DPHC in terms of verification and changeability performances.
6 Conclusions
According to the analysis on the effects of multiple-shifted matching, which suggests the removal of horizontal shift, a variant of 2DPHC, coined as Simplified 2DPHC (S2DPHC), is proposed. Unlike 2DPHC, S2DPHC reduces matching complexity, enhances changeability and improves accuracy performance. The mechanisms of favorable changeability and verification performances of 2DPHC and S2DPHC are revealed and justified. The established analytic framework could be of useful for the works that follow cancelable coding approach.
References
Achlioptas D (2003) Database-friendly random projections: Johnson-Lindenstrauss with binary coins. J Comput Syst Sci 66(4):671–687
Baraniuk RG, Davenport M, DeVore R, Wakin M (2008) A simple proof of the restricted isometry property for random matrices. Constr Approx 28(3):253–263
Cheung KH, Kong A, You J, Zhang D (2005) An analysis on invertibility of cancelable biometrics based on BioHashing. in: Proceedings of the International Conference on Imaging Science, Systems, and Technology, 40–45
Cheung KH, Kong A, Zhang D, Kamel M, You J, Lam HW (2005) An analysis on accuracy of cancelable biometrics based on BioHashing knowledge-based intelligent information and engineering systems. Lect Notes In Comput Scie 3683:1168–1172
Connie T, Teoh ABJ, Goh M, Ngo D (2005) PalmHashing: a novel approach for cancelable biometrics. Inf Process Lett 93(1):1–5
Cui JR, Wen JJ, Fan ZZ (2015) Appearance-based bidirectional representation for palmprint recognition. Multimed Tools Appl 74(24):10989–11001
Guo ZH, Zhang D, Zhang L, Zuo WM (2009) Palmprint verification using binary orientation co-occurrence vector. Pattern Recogn Lett 30(13):1219–1227
Hammami M, Jemaa SB, Ben-Abdallah H (2014) Selection of discriminative sub-regions for palmprint recognition. Multimed Tools App 68(3):1023–1050
Jain AK, Nandakumar K, Nagar A (2008) Biometric template security. EURASIP J Ad Sign Proc Special Issue Biomet 2008:1–20
Jia W, Huang DS, Zhang D (2007) Palmprint verification based on robust line orientation code. Pattern Recogn 41(5):1504–1513
Johnson W, Linderstrauss J (1984) Extensions of Lipshitz mapping into Hilbert space. Contemp Math 26:189–206
Kong A, Cheung KH, Zhang D, Kamel M (2006) An analysis of BioHashing and its variants. Pattern Recogn 39(7):1359–1368
Kong AWK, Zhang D (2004) Feature-level fusion for effective palmprint authentication. in: Proceedings of the 1st International Conference on Biometric Authentication, 761–767
Kong AWK, Zhang D (2004) Competitive coding scheme for palmprint verification. in: Proceedings of the 17th International Conference on Pattern Recognition, 520–523
Kong A, Zhang D, Kamel M (2008) Three measures for secure palmprint identification. Pattern Recogn 41(4):1329–1337
Leng L, Li M, Teoh ABJ (2013) Conjugate 2DPalmHash Code for secure palm-print-vein verification. in: Proceedings of the 6th International Congress on Image and Signal Processing, 1694–1699
Leng L, Teoh ABJ, Li M, Khan MK (2014) A remote cancelable palmprint authentication protocol based on multi-directional two-dimensional PalmPhasor-fusion. Secur Commun Net 7(11):1860–1871
Leng L, Zhang JS (2013) PalmHash code vs palmphasor code. Neurocomputing 108:1–12
Leng L, Zhang JS, Chen G, Khan MK, Bai P (2011) Two dimensional PalmPhasor enhanced by multi-orientation score level fusion. in: Proceedings of the 8th FTRA International Conference on Secure and Trust Computing, Data Management, and Applications, 122–129
Leng L, Zhang JS, Khan MK, Chen X, Ji M, Alghathbar K (2011) Cancelable PalmCode generated from randomized Gabor filters for palmprint template protection. Sci Res Essays 6(4):784–792
Li HJ, Zhang JS, Wang LH (2014) Robust palmprint identification based on directional representations and compressed sensing. Multimed Tools and Appl 70(30):2331–2345
Li HJ, Zhang JS, Zhang ZT (2010) Generating cancelable palmprint templates via coupled nonlinear dynamic filters and multiple orientation palmcodes. Inf Sci 180(20):3876–3893
Meraoumia A, Chitroub S, Bouridane A (2015) Do multispectral palmprint images be reliable for person identification? Multimed Tools Appl 74(3):955–978
Ratha N, Connell J, Bolle R (2001) Enhancing security and privacy in biometrics-based authentication systems. IBM Syst J 40(3):614–634
Sun ZN, Tan TN, Wang YH, Li SZ (2005) Ordinal palmprint representation for personal identification. in: Proceedings of the IEEE International Conference on Computer Vision Pattern Recognition, 279–284
Tamrakar D, Khanna P (2015) Noise and rotation invariant RDF descriptor for palmprint identification. Multimed Tools App. doi:10.1007/s11042-015-2541-5
Teoh ABJ, Connie T, Ngo D, Ling C (2006) Remarks on BioHash and its mathematical foundation. Inf Process Lett 100(4):145–150
Teoh ABJ, Goh A, Ngo DCL (2006) Random multispace quantization as an analytic mechanism for Biohashing of biometric and random identity inputs. IEEE Trans Pattern Anal Mach Intell 28(12):1892–1901
Teoh ABJ, Lim MH (2010) Cancelable biometrics. Scholarpedia 5(1):9201–9201
Teoh ABJ, Ngo DCL (2005) Cancellable biometrics featuring with tokenised random number. Pattern Recogn Lett 26(10):1454–1460
Teoh ABJ, Ngo DCL, Goh A (2004) BioHashing: two factor authentication featuring fingerprint data and tokenised random number. Pattern Recogn 37(1):2245–2255
Teoh ABJ, Yuang CT (2007) Cancelable biometrics realization with multispace random projections. IEEE Trans Syst Man Cybern B Cybern 37(5):1096–1106
Wang YJ, Hatzinakos D (2011) On random transformations for changeable face verification. IEEE Trans Syst Man Cybern B Cybern 41(3):840–854
Wang YJ, Plataniotis KN (2010) An analysis of random projection for changeable and privacy-preserving biometric verification. IEEE Trans Syst Man Cybern B Cybern 40(5):1280–1293
Zhang D, Kong AWK, You J, Wong M (2003) Online palmprint identification. IEEE Trans Pattern Anal Mach Intell 25(9):1041–1050
Zhang L, Li HY, Niu JY (2012) Fragile bits in palmprint recognition. IEEE Sign Proc Lett 19(10):663–666
Zhang D, Zuo WM, Yue F (2012) A comparative study of palmprint recognition algorithm. ACM Comput Surv 44(1):1–36
Acknowledgments
The authors would like to thank Biometric Research Center at Hong Kong Polytechnic University for providing us with the palmprint database. This work was supported by Basic Science Research Program through the National Research Foundation (NRF) of Korea funded by Ministry of Science, ICT and Future Planning (2013006574), National Natural Science Foundation of China (61305010, 61262019), Institute of BioMed-IT, Energy-IT and Smart-IT Technology (BEST), a Brain Korea 21 Plus Program, Yonsei University (2014-11-0007), Science and Technology Project of Education Department of Jiangxi Province(GJJ150715), Voyage Project of Jiangxi Province (201450), and Open Foundation of Key Laboratory of Jiangxi Province for Image Processing and Pattern Recognition (TX201604002).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
1.1 Proof of property 1
Since Z = XY,
Then \( {f}_Z(z)={\displaystyle {\int}_{-\infty}^{\infty}\frac{1}{\left|x\right|}}{f}_{X,Y}\left(x,\frac{z}{x}\right)dx={\displaystyle {\int}_{-\infty}^{\infty}\frac{1}{\left|x\right|}}{f}_X(x){f}_Y\left(\frac{z}{x}\right)dx \),\( {f}_Z\left(-z\right)={\displaystyle {\int}_{-\infty}^{\infty}\frac{1}{\left|x\right|}}{f}_X(x){f}_Y\left(\frac{-z}{x}\right)dx={\displaystyle {\int}_{-\infty}^{\infty}\frac{1}{\left|x\right|}}{f}_X(x){f}_Y\left(\frac{z}{x}\right)dx, \)Therefore, f Z (z) = f Z (−z). ■
1.2 Proof of property 2
Since Z = X + Y,then f Z (z) = ∫ ∞− ∞ f X (z − y)f X (y)dy, f Z (−z) = ∫ ∞− ∞ f X (−z − y)f X (y)dy. \( \begin{array}{l}{f}_Z(z)-{f}_Z\left(-z\right)\\ {}={\displaystyle {\int}_{-\infty}^{\infty }{f}_X\left(z-y\right)}{f}_Y(y) dy-{\displaystyle {\int}_{-\infty}^{\infty }{f}_X\left(-z-y\right)}{f}_Y(y) dy\\ {}={\displaystyle {\int}_{-\infty}^{\infty}\left[{f}_X\left(z-y\right)-{f}_X\left(-z-y\right)\right]}{f}_Y(y) dy\end{array} \), then g Y (y) = f X (z − y) − f X (−z − y) = f X (z − y) − f X (z + y), g Y (−y) = f X (z + y) − f X (−z + y) = f X (z + y) − f X (z − y).
Since g Y (y) = −g Y (−y), then g Y (y) is an odd function with respect of y.
Since f Y (y) is an even function with respect of y, so g Y (y)f Y (y) = [f X (z–y)–f X (−z–y)]f Y (y) is an odd function with respect of y, then f Z (z) − f Z (−z) = ∫ ∞− ∞ [f X (z − y) − f X (−z − y)]f Y (y)dy = 0.Therefore, f Z (z) = f Z (−z). ■
Rights and permissions
About this article

Cite this article
Leng, L., Teoh, A.B.J. & Li, M. Simplified 2DPalmHash code for secure palmprint verification. Multimed Tools Appl 76, 8373–8398 (2017). https://doi.org/10.1007/s11042-016-3458-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-016-3458-3