
Abstract
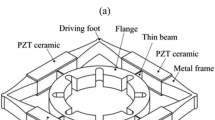
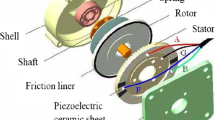
In this paper, the linear ultrasonic motor is newly designed to apply for the actuator of X-Y stage, its vibration mode is analyzed by FEM software, and its characteristics are studied as a function of the inner diameter of the elastic body. As a result from FEM analysis, the stator simultaneously vibrates to radial and bending vibration mode. Based on the result, ring-type linear ultrasonic motors are fabricated according to its inner diameter and its resonant frequency is measured by impedance analyzer. As inner diameter increases, its resonant frequency and velocity decreases. When its inner diameter, input voltage and driving frequency are 10 mm, 20 Vpp and 68.6 kHz, the velocity of the moving body is about 100 mm/s.
Similar content being viewed by others

References
Gene H. Haertling, “Ferroelectric ceramics: History and technology,” J. Am. Ceram. Soc., 4(82), 797–818 (1999).
Shijie GUO, et al., “A three-dimensional vibration analysis of the stator of an ultrasonic motor, ” JSME, 57(541), 20–26 (1991).
Y. Tomikawa et al., “A paper or card forwarding device using a flat-type ultrasonic motor, ” Sensors Mater., 1(6), 359–379 (1989).
Burhanettin Koc et al., “An ultrasonic motor using a metal-ceramic composite actuator generating torsional displacement, ” JJAP, 37(10), 5659–5662 (1998).
S. Ueha et al., Ultrasonic Motors; Theory and Applications, (CLARENDON PRESS 1993), pp. 59–92.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Lim, KJ., Lee, JS. & Kang, SH. The design and characteristics of ring type linear ultrasonic motor for X-Y stage. J Electroceram 17, 557–560 (2006). https://doi.org/10.1007/s10832-006-8570-8
Received:
Revised:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/s10832-006-8570-8