
Abstract
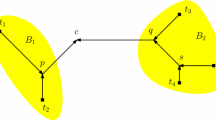
If in the Steiner problem on graph the number of terminal nodes is much smaller than that of all graph nodes (say 50 against 1000), then one can see in its solution (the minimum tree) a system of paths on the graph connecting the terminal vertices, rather than a collection of separate edges (or arcs). This path system is similar to the system of segments making up the Steiner tree on the Euclidean plane: the local degree of the terminal nodes usually is 1, and the local degree of some nodes making up the paths is 3 or more. These nodes are the counterparts of the Steiner points in the problem on plane. Structural similarity of the trees in the Steiner problems on the Euclidean plane and on graph enables one to construct the algorithm to solve the Steiner problem on graph along the same lines as in the Steiner problem on the Euclidean plane. On the other hand, the solution of a problem on graph may be regarded as that on the Euclidean plane, provided that the graph satisfies certain requirements.
Similar content being viewed by others

REFERENCES
Gordeev, E.N. and Tarastsov, O.G., Steiner Problem. Review, Diskretn. Mat., 1993, vol. 5, no.2, pp. 3–28.
Courant, R. and Robbins, H., What is Mathematics?, London: Oxford Univ. Press, 1941. Translated under the title Chto takoe matematika?, Moscow: Prosveshchenie, 1967.
Lotarev, D.T., Suprun, A.V., and Uzdemir, A.P., Local Optimization in the Steiner Problem on the Euclidean Plane, Avtom. Telemekh., 2004, no. 7, pp. 60–70.
Garey, M.L. and Johnson, D.S., Computers and Intractability: A Guide to the Theory of NP-Completeness, San Francisco: Freeman, 1979. Translated under the title Vychislitel'nye machiny i trudnoreshaemye zadachi, Moscow: Mir, 1982.
Lotarev, D.T. and Uzdemir, A.P., Arranging Transport Networks on a Nonuniform Territory, Avtom. Telemekh., 2002, no. 7, pp. 117–127.
Randazzo, C.D., Luna, H.P.L., and Mahey, P., Benders Decomposition for Local Access Network Design with Two Technologies, Discrete Math. Comput. Sci., 2001, vol. 4, pp. 235–246.
Voß, S., The Steiner Tree Problem with Hop Constraints, Ann. Oper. Res., 1999, vol. 86, pp. 321–345.
Christofides, N., Graph Theory. An Algorithmic Approach, New York: Academic, 1975. Translated under the title Teoriya grafov. Algoritmicheskii podkhod, Moscow: Mir, 1978.
Author information
Authors and Affiliations
Additional information
__________
Translated from Avtomatika i Telemekhanika, No. 10, 2005, pp. 80–92.
Original Russian Text Copyright © 2005 by Lotarev, Uzdemir.
This work was supported by the Russian Foundation for Basic Research, project no. 03-01-00777.
Rights and permissions
About this article
Cite this article
Lotarev, D.T., Uzdemir, A.P. Conversion of the Steiner Problem on the Euclidean Plane to the Steiner Problem on Graph. Autom Remote Control 66, 1603–1613 (2005). https://doi.org/10.1007/s10513-005-0194-y
Received:
Issue Date:
DOI: https://doi.org/10.1007/s10513-005-0194-y