
Abstract
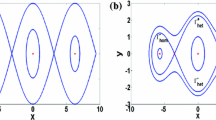
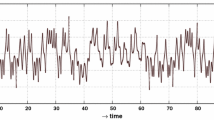
An open-plus-closed-loop (OPCL) control problem for the chaotic motion of a 3D rigid pendulum subjected to a constant gravitational force is studied. The 3D rigid pendulum is assumed to be consist of a rigid body supported by a fixed and frictionless pivot with three rotational degrees. In order to avoid the singular phenomenon of Euler’s angular velocity equation, the quaternion kinematic equation is used to describe the motion of the 3D rigid pendulum. An OPCL controller for chaotic motion of a 3D rigid pendulum at equilibrium position is designed. This OPCL controller contains two parts: the open-loop part to construct an ideal trajectory and the closed-loop part to stabilize the 3D rigid pendulum. Simulation results show that the controller is effective and efficient.
Similar content being viewed by others

References
Shen, J., Sanyal, A. K., Chaturvedi, N. A., Bernstein, D., and McClamroch, N. H. Dynamics and control of a 3D pendulum. Proceeding of 43rd IEEE Conference on Decision and Control, IEEE Press, Bahamas, 323–328 (2004)
Chaturvedi, N. A., Lee, T., Leok, M., and McClamroch, N. H. Nonlinear dynamic of the 3D pendulum. Journal of Nonlinear Science, 21(1), 3–32 (2011)
Chang, J. and Ge, X. S. Chaotic attitude motion of the 3D rigid pendulum. Proceeding of 3rd International Conference on Advanced Computer Control, IEEE Press, Harbin, 470–472 (2011)
Chaturvedi, N. A., Bacconi, F., Sanyal, A. K., Bernstein, D., and McClamroch, N. H. Stabilization of a 3D rigid pendulum. Proceeding of American Control Conference, IEEE Press, Ann Arbor, 3030–3035 (2005)
Santillo, M. A., Chaturvedi, N. A., Bacconi, F., McClamroch, N. H., and Bernstein, D. Experiments on stabilization of the hanging equilibrium of a 3D asymmetric rigid pendulum. IEEE Conference on Control Applications, IEEE Press, Toronto, 308–313 (2005)
Jackson, E. A. and Grosu, I. An open-plus-close-loop (OPCL) control of complex dynamic systems. Nonlinear Phenomena, 85(1), 1–9 (1995)
Jackson, E. A. The OPCL control for entrainment, model-resonance and migration actions on multi-attractor systems. Chaos, 7(4), 550–559 (1997)
Chen, L. Q. and Liu, Y. Z. An open-plus-closed-loop control for chaotic motion of nonlinear oscillators (in Chinese). Journal of Applied Science, 17(4), 445–449 (1999)
Chen, L. Q. An open-plus-closed-loop control for discrete chaos and hyperchaos. Physics Letters A, 281(5–6), 327–333 (2001)
Chen, L. Q. and Liu, Y. Z. An open-plus-closed-loop approach to synchronization of chaotic and hyperchaotic maps. International Journal of Bifurcation and Chaos, 12(5), 1219–1225 (2002)
Chen, L. Q. and Liu, Y. Z. The parametric open-plus-closed-loop control of chaotic maps and its robustness. Chaos, Solitons and Factals, 21(1), 113–118 (2004)
Han, Q. K., Zhao, X. Y., and Wen, B. C. Synchronization motion of a two-link mechanism with an improved OPCL method. Applied Mathematics and Mechanics (English Edition), 29(12), 1561–1568 (2008) DOI 10.1007/s10483-008-1204-z
Author information
Authors and Affiliations
Corresponding author
Additional information
Project supported by the National Natural Science Foundation of China (No.11072038) and the Municipal Key Programs of Natural Science Foundation of Beijing (No.KZ201110772039)
Rights and permissions
About this article

Cite this article
Ge, Xs., Zou, K. Open-plus-closed-loop control for chaotic motion of 3D rigid pendulum. Appl. Math. Mech.-Engl. Ed. 35, 403–412 (2014). https://doi.org/10.1007/s10483-014-1800-8
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10483-014-1800-8