
Abstract
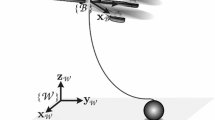
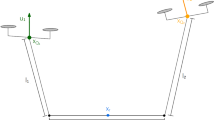
We study the problem of dynamically controlling the shape of a cable that is fixed at one end and attached to an actuated robot at another end. This problem is relevant to unmanned aerial vehicles (UAVs) tethered to a base. While rotorcrafts, such as quadcopters, are agile and versatile in their applications and have been widely used in scientific, industrial, and military applications, one of the biggest challenges with such UAVs is their limited battery life that make the flight time for a typical UAVs limited to twenty to thirty minutes for most practical purposes. A solution to this problem lies in the use of cables that tether the UAV to a power outlet for constant power supply. However, the cable needs to be controlled effectively in order to avoid obstacles or other UAVs. In this paper, we develop methods for controlling the shape of a cable using actuation at one end. We propose a discrete model for the spatial cable and derive the equations governing the cable dynamics for both force controlled system and position controlled system. We design a controller to control the shape of the cable to attain the desired shape and perform simulations under different conditions. Finally, we propose a quasi-static model for the spatial cable and discuss the stability of this system and the proposed controller.

















Similar content being viewed by others

References
Goriely, A., McMillen, T.: Shape of a cracking whip. Phys. Rev. Lett. 88(24), 244301 (2002)
Koh, C., Rong, Y.: Dynamic analysis of large displacement cable motion with experimental verification. J. Sound Vib. 272, 187–206 (2004)
Jimenez, J., Hernández, G., Campos, I., et al.: Newtonian and canonical analysis of the motion of a rope falling from a table. Eur. J. Phys. 26, 1127–1137 (2005)
Breukels, J., Ockels, W.: A multi-body dynamics approach to a cable simulation for kites. In: Proceedings of the IASTED Asian Conference on Modelling and Simulation, pp. 168–173 (2007)
Fritzkowski, P., Kaminski, H.: Dynamics of a rope as a rigid multibody system. J. Mech. Mater. Struct. 3, 1059–1075 (2008)
Fritzkowski, P., Kaminski, H.: A discrete model of a rope with bending stiffness or viscous damping. Acta Mech. Sin. 27, 108–113 (2011)
Williams, P.: Cable modeling approximations for rapid simulation. J. Guid. Control Dyn. 40, 0731–5090 (2017)
Papacharalampopoulos, A., Makris, S., Bitzios, A., et al.: Prediction of cabling shape during robotic manipulation. Int. J. Adv. Manuf. Technol. 82, 123–132 (2016)
Tonapi, M.M., Godage, I.S., Vijaykumar, A., et al.: Spatial kinematic modeling of a long and thin continuum robotic cable. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3755–3761 (2015).
Matsuno, T., Fukuda, T.: Manipulation of flexible rope using topological model based on sensor information. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2638–2643 (2006)
Takizawa, M., Kudoh, S., Suehiro, T.: Method for placing a rope in a target shape and its application to a clove hitch. In: the 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 646–651 (2015). https://doi.org/10.1109/ROMAN.2015.7333617
Nair, A., Chen, D., Agrawal, P., et al.: Combining self-supervised learning and imitation for vision-based rope manipulation. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 2146–2153 (2017)
Wang, Y., Lai, X., Chen, L., et al.: A quick control strategy based on hybrid intelligent optimization algorithm for planar n-link underactuated manipulators. Inf. Sci. 420, 148–158 (2017). https://doi.org/10.1016/j.ins.2017.08.052. http://www.sciencedirect.com/science/article/pii/S0020025516318126
Bhattacharya, S., Heidarsson, H., Sukhatme, G.S., et al.: Cooperative control of autonomous surface vehicles for oil skimming and cleanup. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 2374–2379 (2011)
Kallem, V., Chang, D.E., Cowan, N.J.: Task-induced symmetry and reduction in kinematic systems with application to needle steering. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3302–3308. (2007)
Aukes, D., Kim, S., Garcia, P., et al.: Selectively compliant underactuated hand for mobile manipulation. In: IEEE International Conference on Robotics and Automation, pp. 2824–2829 (2012). https://doi.org/10.1109/ICRA.2012.6224738
Hand, L.N., Finch, J.D.: Analytical Mechanics. Cambridge University Press, Cambridge (1998)
Golub, G.H., Van Loan, C.F.: Matrix Computations, vol. 3. JHU Press, Baltimore (2012)
Horn, R.A., Johnson, C.R.: Matrix Analysis. Cambridge University Press, New York (1986)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tian, B., Bhattacharya, S. Modelling and control of a spatial dynamic cable. Acta Mech. Sin. 35, 866–878 (2019). https://doi.org/10.1007/s10409-019-00844-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-019-00844-3