
Abstract
This paper develops analytical electromechanical formulas to predict the mechanical deformation of ionic polymer–metal composite (IPMC) cantilever actuators under DC excitation voltages. In this research, IPMC samples with Pt and Ag electrodes were manufactured, and the large nonlinear deformation and the effect of curvature on surface electrode resistance of the IPMC samples were investigated experimentally and theoretically. A distributed electrical model was modified for calculating the distribution of voltage along the bending actuator. Then an irreversible thermodynamic model that could predict the curvature of a unit part of an IPMC actuator is combined with the electrical model so that an analytical electromechanical model is developed. The electromechanical model is then validated against the experimental results obtained from Pt- and Ag-IPMC actuators under various excitation voltages. The good agreement between the electromechanical model and the actuators shows that the analytical electromechanical model can accurately describe the large nonlinear quasi-static deflection behavior of IPMC actuators.











Similar content being viewed by others

References
Shahinpoor, M., Bar-Cohen, Y., Simpson, J.O., et al.: Ionic polymer–metal composites (IPMCs) as biomimetic sensors, actuators and artificial muscles—a review. Smart Mater. Struct. 7, R15–R30 (1998)
Shahinpoor, M., Kim, K.J.: Ionic polymer–metal composites: I. Fundamentals. Smart Mater. Struct. 10, 819–833 (2001)
Kim, K.J., Shahinppor, M.: Ionic polymer–metal composites:II. Manufacturing technique. Smart Mater. Struct. 12, 65–79 (2003)
Akle, B.J., Bennett, M.D., Leo, D.J., et al.: Direct assembly process: a novel fabrication technique for large strain ionic polymer transducers. J. Mater. Sci. 40, 7031–7041 (2007)
Bian, K., Xiong, K., Liu, G., et al.: Preparation and dynamic displacement testing of ionic polymer metal composites with platinum as electrodes. Acta Mater. Compos. Sin. 28, 115–120 (2011)
De-Gennes, P.G., Okumura, K., Shahinpoor, M., et al.: Mechanoelectric effects in ionic gels. Europhys. Lett. 50, 513–518 (2000)
Nemat-Nasser, S., Li, J.Y.: Electromechanical response of ionic polymer–metal composites. J. Appl. Phys. 92, 3321–3331 (2000)
Nemat-Nasser, S.: Micro-mechanics of actuation of ionic polymer–metal composites. J. Appl. Phys. 90, 2899–2915 (2002)
Shahinpoor, M., Kim, K.J.: Mass transfer induced hydraulic actuation in ionic polymer–metal composites. J. Intell. Mater. Syst. Struct. 13, 369–376 (2002)
Tamagawa, H., Goto, S., Sugiyama, T.: Bending direction of Ag-plated IPMC containing immobile anions and/or cations. Compos. Sci. Technol. 68, 3412–3417 (2008)
Bar-Cohen, Y.: Electroactive polymer (EAP) actuator as artificial muscle: reality, potential, and challenges. SPIE Press, Bellinghan (2004)
Moeinkhah, H., Rezaeepazhand, J., Akbarzadeh, A.: Analytical dynamic modeling of a cantilever IPMC actuator based on a distributed electrical circuit. Smart Mater. Struct. 22, 055033 (2013)
Luca, V.D., Digiamberardino, P., Pasquale, G.D., et al.: Ionic electroactive polymer metal composites: fabricating, modeling, and applications of postsilicon smart devices. J. Polym. Sci. Pol. Phys. 51, 699–734 (2013)
Shahinpoor, M., Kim, K.J.: Ionic polymer–metal composites: IV. Industrial and medical applications. Smart Mater. Struct. 14, 197–214 (2005)
Colozza, A.: Fly like a bird. IEEE Spectrum. 44, 38–43 (2007)
Jain, R.K., Datta, S., Majumder, S.: Design and control of an IPMC artificial muscle finger for micro gripper using EMG signal. Mechatronics 23, 381–394 (2013)
Jain, R.K., Majumder, S., Dutta, A.: SCARA based peg-in-hole assembly using compliant IPMC based micro gripper. Robot. Auton. Syst. 61, 297–311 (2013)
Aurelil, M., Kopman, V., Porfiri, M.: Free-locomotion of underwater vehicles actuated by ionic polymer metal composites. IEEE-ASME. Trans. Mech. 15, 603–614 (2010)
Najem, J., Sarles, S., Akle, B., et al.: Biomimetic jellyfish-inspired underwater vehicle actuated by ionic polymer metal composite actuators. Smart Mater. Struct. 21, 094026 (2012)
Abdelnour, K., Stinchcombe, A., Porfiri, M.: Wrieless powering of ionic polymer metal composites toward hovering microswimmers. IEEE-ASME. Trans. Mech. 17, 924–934 (2012)
Moghadam, A.A.A., Kouzani, A., Shanippor, M., et al.: Development of a novel soft parallel robot equipped with polymeric artificial muscles. Smart Mater. Struct. 24, 035017 (2015)
Aw, K.C., McDaid, A.J.: Bio-applications of ionic polymer metal composite transducers. Smart Mater. Struct. 23, 074005 (2014)
Kanno, R., Tadokoro, S., Takamori, T., et al.: Modeling of ICPF actuator, modeling of electrical characteristics. Proc. IEEE Int. Conf. Ind. Electron. Control Instrum. 2, 913–918 (1995)
Annabestani, M., Naghavi, N.: Nonlinear identification of IPMC actuators based on ANFIS–NARX paradigm. Sens. Actuators A Phys. 209, 140–148 (2014)
Truong, D.Q., Ahn, K.K.: Modeling of an ionic polymer metal composite actuator based on an extended Kalman filter trained nueral network. Smart Mater. Struct. 23, 074008 (2014)
Bonomo, C., Fortuna, L., Giannone, P., et al.: A nonlinear model for ionic polymer metal composites as actuators. Smart Mater. Struct. 16, 1–12 (2007)
Vahabi, M., Mehdizadeh, E., Kabganian, M.: Experimental identification of IPMC actuator parameters through incorporation of linear and nonlinear least squares methods. Sens. Actuators A Phys. 168, 140–148 (2011)
Liu, Y., Zhao, R., Ghaffari, M.: Equivalent circuit modeling of ionomer and ionic polymer conductive network composite actuators containing ionic liquids. Sens. Actuators A Phys. 181, 70–76 (2012)
Caponetto, R., Graziani, S., Pappalardo, F.: Identification of IPMC nonlinear model via single and muti-objective optimization algorithms. ISA. Trans. 53, 481–488 (2014)
Porfiri, M.: An electromechanical model for sensing and actuation of ionic polymer metal composite. Smart Mater. Struct. 18, 015016 (2009)
Sun, A.B., Bajon, D., Moschetta, J.M.: Integrated static and dynamic modeling of an ionic polymer–metal composite actuator. J. Intell. Mater. Syst. Struct. 26, 1164–1178 (2015)
Kothera, C.S., Leo, D.J.: Identification of the nonlinear response of ionic polymer actuators using the Volterra series. J. Vib. Control 11, 519–541 (2005)
Anto, M., Aabloo, A., Punning, A., et al.: A mechanical model of a non-uniform ionomeric polymer metal composite actuator. Smart Mater. Struct. 17, 025004 (2008)
Alici, G.: An effective modelling approach to estimate nonlinear bending behavior of cantilever type conducting polymer actuators. Sens. Actuators B Chem. 141, 284–292 (2009)
Nam, D.N.C., Ahn, K.K.: Identification of an ionic polymer composite actuator employing Preisach type fuzzy NARX model and particle swarm optimization. Sens. Actuators A Phys. 183, 105–114 (2012)
Annabestani, M., Naghavi, N.: Non-uniformation and curvature identification of ionic polymer metal composite actuators. J. Intell. Mater. Syst. Struct. 26, 582–598 (2015)
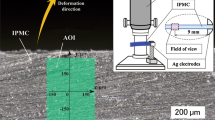
Punning, A., Vunder, V., Must, I., et al.: In situ scanning electron microscopy study of strains of ionic electroactive polymer actuators. J. Intell. Mater. Syst. Struct. 27, 1061–1074 (2016)
Zhu, J., Xie, H., Li, Y., et al.: Interfacial residual stress analysis of thermal spray coatings by miniature ring-core cutting combined with DIC method. Exp. Mech. 54, 127–136 (2014)
Kanno, R., Tadokoro, S., Takamori, T., et al.: Linear approximate dynamic model of ICPF actuator. In: Proc. IEEE Int. Conf. Robot. Autom. 1, 219–225 (1996)
Punning, A., Johanson, U., Anton, M., et al.: A distributed model of ionomeric polymer metal composite. J. Intell. Mater. Syst. Struct. 20, 1711–1723 (2009)
Bian, K., Xiong, K., Chen, Q., et al.: Manufacture and actuating characteristic of ionic polymer metal composites with silver electrodes. Chin. J. Mater. Res. 24, 520–524 (2010)
Punning, A., Kruusmaa, M., Aabioo, A.: Surface resistance experiments with IPMC sensor and actuators. Sens. Actuators A Phys. 133, 200–209 (2007)
Branco, P.J.C., Dente, J.A.: Derivation of a continuum model and its electric equivalent-circuit representation for ionic polymer–metal composite (IPMC) electromechanics. Smart Mater. Struct. 15, 378–392 (2006)
Shahinpoor, M., Kim, K.J.: Ionic polymer–metal composites: III. Modeling and simulation as biomimetic sensors, actuators, transducers, and artificial muscles. Smart Mater. Struct. 13, 1362–1388 (2004)
Acknowledgements
The project was supported by the National Natural Science Foundation of China (Grants 11372132, 11502109).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, H., Xiong, K., Bian, K. et al. Experimental study and electromechanical model analysis of the nonlinear deformation behavior of IPMC actuators. Acta Mech. Sin. 33, 382–393 (2017). https://doi.org/10.1007/s10409-016-0631-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-016-0631-x