
Abstract
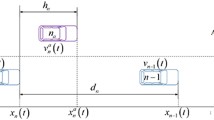
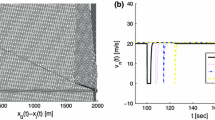
In this paper, a new car-following model is presented, taking into account the anticipation of potential lane changing by the leading vehicle. The stability condition of the model is obtained by using the linear stability theory. The modified Korteweg–de Vries (KdV) equation is constructed and solved, and three types of traffic flow in the headway-sensitivity space, namely stable, metastable and unstable ones, are classified. Both the analytical and simulation results show that anxiety about lane changing does indeed have an influence on driving behavior and that a consideration of lane changing probability in the car-following model could stabilize traffic flows. The quantitative relationship between stability improvement and lane changing probability is also investigated.
Similar content being viewed by others

References
Chowdhury D., Santen L., Schreckenberg A.: Statistical physics of vehicular traffic and some related system. Phys. Rep. 329, 199–329 (2000)
Bando M., Hasebe K., Nakayama A., Shibata A., Sugiyama Y.: Dynamic model of traffic congestion and numerical simulation. Phys. Rev. E 51, 1035–1042 (1995)
Bando M., Hasebe K., Nakanishi K., Nakayama A.: Analysis of optimal velocity model with explicit delay. Phys. Rev. E 58, 5429–5435 (1998)
Davis L.C.: Comment on analysis of optimal velocity model with explicit delay. Phys. Rev. E 66, 038101 (2002)
Davis L.C.: Effect of cooperative merging on the synchronous flow phase of traffic. Physica A 361, 606–618 (2006)
Lubashevsky I., Wagner P., Mahkne R.: Bounded rational driver models. Eur. Phys. J. B 32, 243–247 (2003)
Lubashevsky I., Wagner P., Mahkne R.: Rational-driver approximation in car-following theory. Phys. Rev. E 68, 056109 (2003)
Komatsu T., Sasa S.I.: Kink solution charactering traffic congestion. Phys. Rev. E 52, 5574–5582 (1995)
Helbing D., Tilch B.: Generalized force model of traffic flow. Phys. Rev. E 58, 133–138 (1998)
Treiber M., Hennecke A., Helbing D.: Derivation, properties, and simulation of a gas-kinetic-based, nonlocal traffic model. Phys. Rev. E 59, 239–253 (1999)
Treiber M., Hennecke A., Helbing D.: Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 62, 1805–1824 (2000)
Jiang R., Wu Q.S., Zhu Z.J.: Full velocity difference model for car-following theory. Phys. Rev. E 64, 017101 (2001)
Xue Y.: Analysis of the stability and density waves for traffic flow. Chin. Phys. 11, 1128–1134 (2002)
Nagatani T.: Stability and enhancement of traffic flow by next-nearest-neighbor interaction. Phys. Rev. E 60, 6395–6401 (1999)
Lenz H., Wagner C.K., Sollacher R.: Multi-anticipative car-following model. Eur. Phys. J. B 7, 331–335 (1999)
Hasebe K., Nakayama A., Sugiyama Y.: Dynamical model of a cooperative driving system. Phys. Rev. E 68, 026102 (2003)
Hasebe K., Nakayama A., Sugiyama Y.: Equialence of linear response among extended optimal velocity models. Phys. Rev. E 69, 017103 (2004)
Ge H.X., Dai S.Q., Dong L.Y., Xue Y.: Stabilization effect of traffic flow in an extended car-following model based on intelligent transportation system application. Phys. Rev. E 70, 066134 (2004)
Zhao X.M., Gao Z.Y.: A new car-following model: full velocity and acceleration difference model. Eur. Phys. J. B 47, 145–150 (2005)
Wang T., Gao Z.Y., Zhao X.M.: Multiple velocity difference model and its stability analysis (in Chinese). Acta Phys. Sin. 55, 634–640 (2006)
Gipps P.G.: A behavioural car-following model for computer simulation. Transp. Res. B 15, 105–111 (1981)
Gipps P.G.: A model for the lane-changing decision. Transp. Res. B 20, 403–414 (1986)
Spyropoulou I.: Simulation using Gipps’ car-following model an in-depth analysis. Transportmetrica 3, 231–245 (2007)
Kurata S., Nagatani T.: Spatio-temporal dynamics of jams in two-lane traffic flow with a blockage. Physica A 318, 537–550 (2003)
Nagai R., Nagatani T., Taniguchi N.: Traffic states and jamming transitions introduced by a bus in two-lane traffic flow. Physica A 350, 548–562 (2005)
Tang T.Q., Huang H.J.: Continuum models for freeways with two lanes and numerical tests. Chin. Sci. Bull. 49, 2097–2104 (2004)
Huang H.J., Tang T.Q., Gao Z.Y.: Continuum modeling for two-lane traffic flow. Acta Mech. Sin. 22, 132–137 (2006)
Tang T.Q., Huang H.J., Xue Y.: An improved two-lane traffic flow lattice model (in Chinese). Acta Phys. Sin. 55, 4026–4031 (2006)
Tang T.Q., Huang H.J., Gao Z.Y.: Stability of car-following model on two lanes. Phys. Rev. E 72, 066124 (2005)
Tang T.Q., Huang H.J., Wong S.C., Jiang R.: Lane-changing analysis for two-lane traffic flow. Acta Mech. Sin. 23, 49–54 (2007)
Tang T.Q., Huang H.J., Xu X.Y., Xue Y.: Analysis of density wave in two-lane traffic. Chin. Phys. Lett. 24, 1410–143 (2007)
Tang C.F., Jiang R., Wu Q.S.: Extended speed gradient model for traffic flow on two-lane freeways. Chin. Phys. 16, 1570–1575 (2007)
Huang D.W.: Lane-changing behavior on highways. Phys. Rev. E 66, 026124 (2002)
Tang T.Q., Huang H.J., Gao Z.Y., Wong S.C.: Interactions of waves in the speed-gradient traffic flow model. Physica A 380, 481–489 (2007)
Author information
Authors and Affiliations
Corresponding author
Additional information
The project supported by the National Natural Science Foundation of China (70701002, 70521001), the National Basic Research Program of China (2006CB705503), and the Research Grants Council of the Hong Kong Special Administrative Region (HKU7187/05E).
Rights and permissions
About this article
Cite this article
Tang, T., Huang, H., Wong, S.C. et al. A car-following model with the anticipation effect of potential lane changing. Acta Mech Sin 24, 399–407 (2008). https://doi.org/10.1007/s10409-008-0163-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-008-0163-0