
Abstract
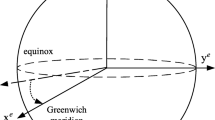
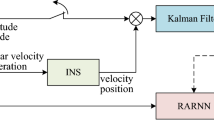
In global position system (GPS) and inertial navigation system (INS) integrated navigation systems, the positioning method based on artificial intelligence (AI) learning algorithms has the disadvantage of position diverging as the GPS outages time continues. To solve this problem, INS/magnetometer integrated positioning based on neural network is proposed for bridging GPS outages over a long time. First, the possibility of using magnetometer for positioning is verified by analyzing the international geomagnetic reference field model and the magnetometer measurement model. Then, a magnetometer-assisted positioning solution is proposed. This solution includes four parts: the magnetic fields update module with adaptive extended Kalman filter (AEKF), predictor by AI, INS/GPS integration with KF, and INS/position integration with AEKF. The simulation and driving test results show that the proposed method can keep most of the position errors within a certain range and there is no tendency of divergence at all.




















Similar content being viewed by others

References
Abdolkarimi ES, Abaei G, Mosavi MR (2018) A wavelet-extreme learning machine for low-cost INS/GPS navigation system in high-speed applications. GPS Solut 22(1):1–13
Adusumilli S, Bhatt D, Wang H, Bhattacharya P, Devabhaktuni V (2013) A low-cost INS/GPS integration methodology based on random forest regression. Expert Syst Appl 40(11):4653–4659
Adusumilli S, Bhatt D, Wang H, Devabhaktuni V, Bhattacharya P (2015) A novel hybrid approach utilizing principal component regression and random forest regression to bridge the period of GPS outages. Neurocomputing 166:185–192
Fang J, Yang S (2011) Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans Instrum Meas 60(4):1378–1388
Noureldin A, El-Shafie A, Bayoumi M (2011) GPS/INS integration utilizing dynamic neural networks for vehicular navigation. Inf Fusion 12(1):48–57
Semeniuk L, Noureldin A (2006) Bridging GPS outages using neural network estimates of INS position and velocity errors. Meas Sci Technol 17(10):2783–2798
Thébault E et al (2010) International geomagnetic reference field: the eleventh generation. Geophys J Int 183(3):1216–1230
Wang W, Wu Z, Zhang H (2018) An adaptive cascaded Kalman filter for two-antenna GPS/MEMS-IMU integration. In: IEEE/ION PLANS 2018, Institute of Navigation, Monterey, CA, USA, 23–26 April, pp 833–837
Wu Y, Pei L (2017) Gyroscope calibration via magnetometer. IEEE Sens J 17(16):5269–5275
Wu Z, Wang W (2018) Magnetometer and gyroscope calibration method with level rotation. Sensors 18(3):748
Wu Y, Zou D, Liu P, Yu W (2018) Dynamic magnetometer calibration and alignment to inertial sensors by Kalman filtering. IEEE Trans Control Syst Technol 26(2):716–723
Xu Q, Li X, Chan CY (2018) Enhancing localization accuracy of MEMS-INS/GPS/In-vehicle sensors integration during GPS outages. IEEE Trans Instrum Meas 67(8):1966–1978
Yang B, Lu H, Chen L (2010) BPNN and RBFNN based modeling analysis and comparison for cement calcination process. In: IWACI 2010, 3rd international workshop on advanced computational intelligence, Suzhou, Jiangsu, China, 25–27 August, pp 101–106
Zhang Y, Shen C, Tang J, Liu J (2018) Hybrid algorithm based on MDF-CKF and RF for GPS/INS system during GPS outages (April 2018). IEEE Access 6:35343–35354
Zheng J, Zhao W, Han B, Wen Y (2016) Integrating extreme learning machine with Kalman filter to bridge GPS outages. In: ICISCE 2016, 3rd international conference on information science and control engineering, Beijing, China, 8–10 July, pp 420–424
Acknowledgements
This work is supported by the National Natural Science Foundation (61571148, 61871143), Fundamental Research for the Central University (HEUCFG201823, 3072019CF0402), Heilongjiang Natural Science Foundation (LH2019F006), Research and Development Project of Application Technology in Harbin (2017R-AQXJ095).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wu, Z., Wang, W. INS/magnetometer integrated positioning based on neural network for bridging long-time GPS outages. GPS Solut 23, 88 (2019). https://doi.org/10.1007/s10291-019-0877-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-019-0877-4