
Abstract
We construct an explicit steady stratified purely azimuthal flow for the governing equations of geophysical fluid dynamics. These equations are considered in a setting that applies to the Antarctic Circumpolar Current, accounting for eddy viscosity and forcing terms.
Similar content being viewed by others


1 Introduction
Thorough analytical investigations of exact solutions to the fully nonlinear governing equations of geophysical fluid dynamics (GFD) represent an extensive and active research area, which was initiated by Constantin [1,2,3,4] and Constantin and Johnson [5,6,7,8]. Following this approach, we construct a unidirectional flow satisfying GFD considered in the so-called f-plane at the 45th parallel south, enhanced with an eddy viscosity term and a forcing term, and equipped with appropriate boundary conditions. We propose this specific flow for representing the gross dynamics of the Antarctic Circumpolar Current (ACC)—the World’s longest and strongest Ocean current.

Variations in density and the mean eastward current speed. The black lines in the image represent the fronts of ACC. Image credit: Hellen Phillips (Senior Research Fellow, Institute for Marine and Antarctic Studies, University of Tasmania), Benoit Legresy (CSIRO) and Nathan Bindoff (Professor of Physical Oceanography, Institute for Marine and Antarctic Studies, University of Tasmania)
ACC has no continental barriers: it encircles Antarctica along a 23,000 km path around the polar axis towards East at latitudes between \(40^{\circ }\) and \(60^{\circ }\), see Fig. 1. It thereby links the Atlantic, Pacific and Indian Oceans making it the most important oceanic current in the Earth’s climate system. The structure of ACC is rich and complicated. Many factors contribute to its complex behavior—the most important driver being strong westerly winds in the Southern Ocean region. In addition to that there exist mesoscale eddies of a size up to 100 km, which transport the wind-induced surface stress to the bottom and also enable meridional mass transport; there are sharp changes in water density due to variations in temperature and salinity—known as fronts or jets—located at ACC’s boundaries (see Fig. 1); ACC is strongly constrained by the bottom topography; there are observed variations in time such as the Antarctic Circumpolar Wave; etc. We refer to [13, 15, 16, 23,24,25, 33, 34, 36, 37] for further information about the geophysical aspects and modeling as well as observational data and simulations for ACC.
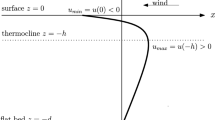
From an analytical perspective one is forced to largely, yet reasonably, simplify the geophysical scenario to obtain a tractable model, which—in the ideal case—exhibits exact and explicit solutions opening the path for an in-depth analysis. Thus we do not account for all of the before mentioned phenomena, but assume a steady flow in purely azimuthal direction, which is vertically bounded by a flat bottom and a flat ocean surface. By considering Euler’s equation of motion in the f-plane, we obtain a valid approximation of the Coriolis effects close to the 45th parallel south; in this way the Earth’s curvature is neglected and no boundaries in the meridional direction are assumed. Even though the \(\beta \)-plane appears to be more accurate than the f-plane (especially for larger deviations in latitudinal direction), the \(\beta \)-plane approximation leads to inconsistencies when applied to non-equatorial regions; see the discussions in [9, 14]. To account for the transportation effects of mesoscale eddies we equip the system with an eddy viscosity term; furthermore we include a forcing term to ensure the dynamical balance of the flow. Both pressure and wind stress are prescribed on the ocean surface; a no-slip boundary condition is assumed for the ocean bed.
A similar setting has recently been considered in [31], where an explicit solution in terms of a given viscosity function was presented. In this note at hand we extend these results to stratified flows, i.e. we do account for variations of the water density (with depth and latitude). The established explicit solution is an analytic function of both the viscosity function and the density distribution. While the present paper aims for an explicit description of certain currents beneath a fixed surface, we point to [11, 30] for relevant studies of exact solutions for free surface waves in the f-plane approximation at mid-latitudes. A collection of numerous recent analytical studies concerning the dynamics of ACC can be found in [7, 17, 18, 22, 26,27,28, 31] and the references therein.
2 Model under study
We introduce the governing equations for geophysical ocean flows that set the basis for our study: we take into account the effects of the Earth’s rotation on the fluid body by choosing a rotating framework with the origin at a point on the Earth’s surface. Accordingly, we will work with Cartesian coordinates (x, y, z), where x denotes the direction of increasing longitude, y is the direction of increasing latitude and z represents the local vertical, respectively. Denoting with t the time variable, and with (u(x, y, z, t), v(x, y, z, t), w(x, y, z, t)) the velocity field, the governing equations for inviscid and incompressible geophysical ocean flows at latitude \(\phi \) are (cf. [3, 29, 35]) the Euler equations
and the equation of mass conservation
where \(\mathbf{u}=(u,v,w)\). Here, \(P=P(x,y,z,t)\) denotes the pressure field, \(\rho =\rho (y,z)\) serves a (prescribed) density distribution to account for density gradients, mainly caused by variations of salinity and temperature, \(\Omega \approx 7.29\times 10^{-5} \, \mathrm {rad} \, \mathrm {s}^{-1}\) is the Earth’s (constant) rotational speed around the polar axis toward the East, and \(g\approx 9.82 \, \mathrm {m}/\mathrm {s}^2\) denotes the gravitational constant. The governing Eqs. (2.1)–(2.2) hold throughout the fluid domain, which lies between the rigid flat bed at \(z=-d\) (d is the constant water depth) and above the flat surface situated at \(z=0\).
Our aim is to derive exact formulas for purely azimuthal flows (i.e. \(v=w=0\)) in the region of the ACC (by fixing \(\phi = -\pi /4\) resulting in the f-plane approximation of (2.1) at the 45th parallel south). Furthermore we incorporate the transfer of the wind-generated surface stress to the bottom, which is due to the presence of mesoscale eddies, by adding a viscosity term of the form \((\nu u_z)_z\) to the right hand side of the first equation in (2.1); the coefficient \(\nu =\nu (z)\) is a smooth function of depth being strictly greater than some positive constant, see [23]. The classical model of uniform eddy viscosity is due to [32]. We follow the more realistic approach with a depth dependent viscosity function as it was introduced in [12]. Finally, we include a forcing term \(F=F(y,z)\) to guarantee non-trivial solutions, cf. [7, 21, 31].
According to the previous considerations, we will consider the following set of equations governing the ACC as a geophysical flow model in the purely azimuthal direction:
and are valid within the fluid domain \({\mathcal {D}}:={\mathbb {R}}^2\times [-d,0]\subset {\mathbb {R}}^3\).
The equations of motion (2.3)–(2.6) are supplemented by the following boundary conditions:
where \(\tau (y,z):=\rho \nu u_z\) represents the wind stress; i.e. we assume a no-slip bottom and constant pressure as well as wind stress at the surface.
3 Explicit solution
Theorem 3.1
The solution (u, P) of system (2.3)–(2.6) with boundary conditions (2.7)–(2.9) is given by
and
for \((y,z)\in {\mathbb {R}}\times [-d,0]\). Furthermore, the forcing term F can be recovered from (2.4) by means of (3.1) and (3.2).
Proof
Utilizing (2.6) we differentiate by x in (2.3)–(2.5) and obtain that
From the condition \(P=P_{atm}\) on the surface \(z=0\) we obtain that \(P_x=0\) on \(z=0\). Thus, from (3.3) we see that
Hence, Eq. (2.3) becomes \((\nu u_z)_z=0\), which implies (making also use of (2.6)) that there is a funtion \(y\mapsto B(y)\) such that
The latter equation and condition (2.9) imply that
Therefore, \(\nu (z)u_z(y,z)=\frac{\tau _0}{\rho (y,0)}\) for all y and for all \(z\in [-d,0]\). Thus, by means of the bottom boundary condition (2.7) we infer that u satisfies (3.1).
Integrating with respect to z in (2.5) we obtain that
where the integration constant C(y) is determined by (2.8) and satisfies
Therefore, P satisfies (3.2) for all \((y,z)\in {\mathbb {R}}\times [-d,0]\). \(\square \)
Remark 3.2
One immediate consequence of (3.1) is that the vorticity vector associated with the flow (3.1), given by \((0,u_z, - u_y)\), has a non-vanishing second and third component. This represents a marked difference, if compared with the case of homogeneous flows (considered in [31]) where only the middle component \(u_z\) survives, the first and the third being zero because of the lack of y dependence of \(\rho \). Thus, allowing for significant variations in density leads to solutions that exhibit substantial shear not only in the vertical direction but also in the latitudinal direction, as well.
We finally point out that three-dimensional effects in ocean waves were recently captured in the papers [3, 4, 10, 19, 20] within the nonlinear setting for equatorial flows.
References
Constantin, A.: On the modelling of equatorial waves. Geophys. Res. Lett. 39, L05602 (2012)
Constantin, A.: An exact solution for equatorially trapped waves. J. Geophys. Res. Oceans 117, C05029 (2012)
Constantin, A.: Some three-dimensional nonlinear equatorial flows. J. Phys. Oceanogr. 43, 165–175 (2013)
Constantin, A.: Some nonlinear, equatorially trapped, nonhydrostatic internal geophysical waves. J. Phys. Oceanogr. 44(2), 781–789 (2014)
Constantin, A., Johnson, R.S.: The dynamics of waves interacting with the equatorial undercurrent. Geophys. Astrophys. Fluid Dyn. 109(4), 311–358 (2015)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal equatorial flow with a free surface. J. Phys. Oceanogr. 46(6), 1935–1945 (2016)
Constantin, A., Johnson, R.S.: An exact, steady, purely azimuthal flow as a model for the Antarctic Circumpolar Current. J. Phys. Oceanogr. 46(12), 3585–3594 (2016)
Constantin, A., Johnson, R.S.: A nonlinear, three-dimensional model for ocean flows, motivated by some observations of the Pacific equatorial undercurrent and thermocline. Phys. Fluids 29, 056604 (2017)
Constantin, A., Johnson, R.S.: Steady large-scale ocean flows in spherical coordinates. Oceanography 31, 42–50 (2018)
Constantin, A., Johnson, R.S.: On the nonlinear, three-dimensional structure of equatorial oceanic flows. J. Phys. Oceanogr. 49, 2029–2042 (2019)
Constantin, A., Monismith, S.G.: Gerstner waves in the presence of mean currents and rotation. J. Fluid Mech. 820, 511–528 (2017)
Cronin, M.F., Kessler, W.S.: Near-surface shear flow in the tropical Pacific cold tongue front. J. Phys. Oceanogr. 39, 1200–1215 (2009)
Danabasoglu, G., McWilliams, J.C., Gent, P.R.: The role of mesoscale tracer transport in the global ocean circulation. Science 264, 1123–1126 (1994)
Dellar, P.J.: Variations on a beta-plane: derivation of non-traditional betaplane equations from Hamilton’s principle on a sphere. J. Fluid Mech. 674, 174–195 (2011)
Farneti, R., Delworth, T.L., Rosati, A., Griffies, S.M., Zeng, F.: The role of mesoscale eddies in the rectification of the Southern Ocean response to climate change. J. Phys. Oceanogr. 40(7), 1539–1557 (2010)
Firing, Y.L., Chereskin, T.K., Mazloff, M.R.: Vertical structure and transport of the Antarctic Circumpolar Current in Drake Passage from direct velocity observations. J. Geophys. Res. 116, C08015 (2004)
Haziot, S.V., Marynets, K.: Applying the stereographic projection to modeling of the flow of the antarctic circumpolar current. Oceanography 31(3), 68–75 (2018)
Haziot, S.V.: Study of an elliptic partial differential equation modelling the Antarctic Circumpolar Current. Discrete Contin. Dyn. Syst. 39(8), 4415–4427 (2019)
Henry, D.: An exact solution for equatorial geophysical water waves with an underlying current. Eur. J. Mech. B Fluids 38, 18–21 (2013)
Henry, D.: Equatorially trapped nonlinear water waves in a beta-plane approximation with centripetal forces. J. Fluid Mech. 804, R1 (2016)
Howard, E., Hogg, A.M., Waterman, S., Marshall, D.P.: The injection of zonal momentum by buoyancy forcing in a Southern Ocean model. J. Phys. Oceanogr. 45, 259–271 (2015)
Hsu, H.-C., Martin, C.I.: On the existence of solutions and the pressure function related to the Antarctic Circumpolar Current. Nonlinear Anal. 155, 285–293 (2017)
Ivchenko, V.O., Richards, K.J.: The dynamics of the Antarctic Circumpolar Current. J. Phys. Oceanogr. 26, 753–774 (2012)
Klinck, J., Nowlin, W.D.: Antarctic Circumpolar Current. In: Steele, J.H., Thorpe, S.A., Turekian, K.K. (eds.) Encyclopedia of Ocean Sciences, pp. 151–159. Academic Press, Cambridge (2001)
Marshall, D.P., Munday, D.R., Allison, L.C., Hay, R.J., Johnson, H.L.: Gill’s model of the Antarctic Circumpolar Current, revisited: the role of latitudinal variations in wind stress. Ocean Model. 97, 37–51 (2016)
Marynets, K.: The Antarctic Circumpolar Current as a shallow-water asymptotic solution of Euler’s equation in spherical coordinates. Deep Sea Res. Part II(160), 58–62 (2019)
Marynets, K.: Stuart-type vortices modeling the Antarctic Circumpolar Current. Monatsh. Math. (2019). https://doi.org/10.1007/s00605-019-01319-0
Marynets, K.: Study of a nonlinear boundary-value problem of geophysical relevance. Discrete Contin. Dyn. Syst. 39(8), 4771–4781 (2019)
Pedlosky, J.: Geophysical Fluid Dynamics. Springer, Berlin (1979)
Pollard, R.T.: Surface waves with rotation: an exact solution. J. Geophys. Res. 75, 5895–5898 (1970)
Quirchmayr, R.: A steady, purely azimuthal flow model for the Antarctic Circumpolar Current. Monatsh. Math. 187(3), 565–572 (2018)
Stommel, H.: Wind drift near the Equator. Deep Sea Res. 6, 298–302 (1960)
Tomczak, M., Godfrey, J.S.: Regional Oceanography: An Introdution. Pergamon Press, Oxford (1994)
Thompson, A.F.: The atmospheric ocean: eddies and jets in the Antarctic Circumpolar Current. Philos. Trans. R. Soc. A 366, 4529–4541 (2008)
Vallis, G.K.: Atmospheric and Oceanic Fluid Dynamics. Cambridge University Press, Cambridge (2006)
White, W.B., Peterson, R.G.: An Antarctic circumpolar wave in surface pressure, wind, temperature and sea-ice extent. Nature 380, 699–702 (1996)
Wolff, J.O.: Modelling the Antarctic Circumpolar Current: eddy-dynamics and their parametrization. Environ. Model. Softw. 14, 317–326 (1999)
Acknowledgements
Open access funding provided by Royal Institute of Technology. The authors are grateful for helpful comments and suggestions from the referee. C. I. Martin would like to acknowledge the support of the Austrian Science Fund (FWF) under research Grant P 30878-N32. R. Quirchmayr acknowledges the support of FWF, Erwin Schrödinger fellowship J 4339-N32, and thanks his host institution—the Department of Mathematics at KTH Royal Institute of Technology.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by A. Constantin.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Martin, C.I., Quirchmayr, R. A steady stratified purely azimuthal flow representing the Antarctic Circumpolar Current. Monatsh Math 192, 401–407 (2020). https://doi.org/10.1007/s00605-019-01332-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00605-019-01332-3
Keywords
- Antarctic Circumpolar Current
- Variable density
- Azimuthal flows
- Eddy viscosity
- Geophysical fluid dynamics