
Abstract
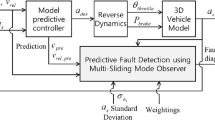
This paper describes a functional perspective-based probabilistic fault detection and diagnostic algorithm of an autonomous vehicle using a longitudinal kinematic model. The relative displacement and velocity between the subject vehicle and a preceding vehicle was obtained by a radar installed in front of the autonomous vehicle. The obtained relative values were used to control the longitudinal behavior of the autonomous vehicle, the longitudinal acceleration of which was obtained from an internal sensor. In order to detect and diagnose actual faults in the obtained values, such as relative displacement, velocity, and acceleration, a fault detection and diagnostic algorithm for the longitudinal control of the autonomous vehicle was developed using a sliding mode observer and predictive function. The probabilistic analysis of fault signals was conducted using the constructed sliding mode observer and predictive function. The actual driving data of the vehicle preceding the subject vehicle was used for the rational performance evaluation of the proposed algorithm. The performance evaluation was conducted in the MATLAB/SIMULINK environment. The evaluation results showed that the proposed fault detection and diagnostic algorithm can stochastically detect and diagnose applied fault signals.

















Similar content being viewed by others

References
Behere S, Torngren M (2016) A functional reference architecture for autonomous driving. Inf Softw Technol 73:136–150
Davoodi M, Meskin N, Khorasani K (2017) A single dynamic observer-based module for design of simultaneous fault detection, isolation and tracking control scheme,” International Journal of Control, pp. 1–16, 2017
Garoudja E, Harrou F, Sun Y, Kara K, Chouder A, Silvestre S (2017) A statistical-based approach for fault detection and diagnosis in a photovoltaic system. IEEE 6th International Conference on Systems and Control(ICSC)
Jeong Y, Kim K, Yoon J, Chong H, Ko B, Yi K (2015) Vehicle sensor and actuator fault detection algorithm for automated vehicles. In Intelligent Vehicles Symposium (IV), IEEE, pp 927–932
Jo K, Kim J, Kim D, Jang C, Sunwoo M (2015) Development of autonomous car—part II: a case study on the implementation of an autonomous driving system based on distributed architecture. IEEE Trans Ind Electron 62(8):5119–5132
Kim Y, Jeon N, Lee H (2016) Model based fault detection and isolation for driving motors of a ground vehicle. Sensors Transducers 199(4):67–72
Li X, Song Y, Guo J, Feng C, Li G, Yan T, He B (2017) Sensor fault diagnosis of autonomous underwater vehicle based on extreme learning machine. Underwater Technol (UT), pp 1–5
Li H, Yang Y, Wei Y, Dai F (2017b) Observer-based fault reconstruction for linear systems using adaptive sliding mode method. J Robot, Netw Artif Life 3(4):236–239
Loureiro R, Benmoussa S, Touati Y, Merzouki R, Bouamama B (2014) Integration of fault diagnosis and fault-tolerant control for health monitoring of a class of MIMO intelligent autonomous vehicles. IEEE Trans Veh Technol 63(1):30–39
Sargolzaei A, Crane C, Abbaspour A, Noei S (2016) A machine learning approach for fault detection in vehicular cyber-physical systems. Machine Learning and Applications (ICMLA), 2016 15th IEEE International Conference, pp 636–640
Shtessel Y et al (2014) Sliding mode control and observation, control engineering. Springer
Stavrou D, Eliades D, Panayiotou C, Polycarpou M (2016) Fault detection for service mobile robots using model-based method. Autonomous Robots 40(2):383–394
Tan C, Edwards C (2002) Sliding mode observer for detection and reconstruction of sensor faults. Automatica 38:1815–1821
Wang Y, Xiang J, Markert R, Liang M (2017) Spectral kurtosis for fault detection, diagnosis and prognostics of rotating machines: a review with applications. Mech Syst Signal Process 66(67):679–698
Zinoune C, Bonnifait P, Guzman J (2015) Sequential FDIA for autonomous integrity monitoring of navigation maps on board vehicles. IEEE Trans Intell Transportation Syst 17(1):143–155
Acknowledgments
This work was supported by a grant from the National Research Foundation (NRF) of Korea, funded by the Ministry of Science, ICT, and Future Planning (MSIP) (No. NRF-2016R1E1A1A01943543).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Oh, K., Park, S., Lee, J. et al. Functional perspective-based probabilistic fault detection and diagnostic algorithm for autonomous vehicle using longitudinal kinematic model. Microsyst Technol 24, 4527–4537 (2018). https://doi.org/10.1007/s00542-018-3953-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-018-3953-8