
Abstract
Background
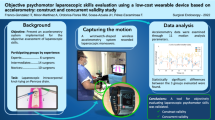
In robotic surgery, the professional ergonomic habit of using an armrest reduces operator fatigue and increases the precision of motion. We designed and validated a pressure surveillance system (PSS) based on force sensors to investigate armrest use. The objective was to evaluate whether adding an alarm to the PSS system could shorten ergonomic training and improve performance.
Study design
Twenty robot and simulator-naïve participants were recruited and randomized in two groups (A and B). The PSS was installed on a robotic simulator, the dV-Trainer, to detect contact with the armrest. The Group A members completed three tasks on the dV-Trainer without the alarm, making 15 attempts at each task. The Group B members practiced the first two tasks with the alarm and then completed the final tasks without the alarm. The simulator provided an overall score reflecting the trainees’ performance. We used the new concept of an “armrest load” score to describe the ergonomic habit of using the armrest.
Results
Group B had a significantly higher performance score (p < 0.001) and armrest load score (p < 0.001) than Group A from the fifth attempt of the first task to the end of the experiment.
Conclusions
Based on the conditioned reflex effect, the alarm associated with the PSS rectified ergonomic errors and accelerated professional ergonomic habit acquisition. The combination of the PSS and alarm is effective in significantly shortening the learning curve in the robotic training process.








Similar content being viewed by others


References
Lee GI, Lee MR et al (2014) Comparative assessment of physical and cognitive ergonomics associated with robotic and traditional laparoscopic surgeries. Surg Endosc 28:456–465
Uemura M, Tomikawa M et al (2014) Analysis of hand motion differentiates expert and novice surgeons. J Surg Res 188:8–13
Nisky I, Allison M et al (2014) Effect of robotic manipulators on movements of novices and surgeons. Surg Endosc 28:2145–2158
Yang K, Perez M, Perrenot C, Hubert N, Felblinger J, Hubert J (2016) Int J Med Robot. (Epub ahead of print). doi:10.1002/rcs.1723
Lendvay TS, Brand TC et al (2013) Virtual reality robotic surgery warm-up improves task performance in a dry laboratory environment: a prospective randomized controlled study. J Am Coll Surg 216:1181–1192
Rehman S, Raza SJ et al (2013) Simulation-based robot-assisted surgical training: a health economic evaluation. Int J Surg 11:841–846
Perrenot C, Perez M et al (2012) The virtual reality simulator dV-Trainer (®) is a valid assessment tool for robotic surgical skills. Surg Endosc 26:2587–2593
Abboudi H, Khan MS et al (2013) Current status of validation for robotic surgery simulators—a systematic review. BJU Int 111:194–205
Patel A, Patel M et al (2014) Can we become better robot surgeons through simulator practice? Surg Endosc 28:847–853
Foell K, Furse A et al (2013) Multidisciplinary validation study of the da Vinci Skills Simulator: educational tool and assessment device. J Robotic Surg 7:365–369
Mansoor J, Stuart B et al (2013) Energy consumption during simulated minimal access surgery with and without using an armrest. Surg Endosc 27:971–977
Galleano R, Carter F et al (2006) Can armrests improve comfort and task performance in laparoscopic surgery? Ann Surg 243:329–333
Safwat B, Su EL et al (2009) The role of posture, magnification, and grip force on microscopic accuracy. Ann Biomed Eng 37:997–1006
Goto T, Hongo K et al (2013) The concept and feasibility of EXPERT: intelligent armrest using robotics technology. Neurosurgery 72(Suppl 1):39–42
Bosma J, Aarts S et al (2015) The Minimally Invasive Manipulator: an ergonomic and economic non-robotic alternative for endoscopy? Minim Invasive Ther Allied Technol 24:24–30
Hubert N, Gilles M et al (2013) Ergonomic assessment of the surgeon’s physical workload during standard and robotic assisted laparoscopic procedures. Int J Med Robotics Comput Assist Surg 9(2):142–147
Tausch TJ, Kowalewski TM et al (2012) Content and construct validation of a robotic surgery curriculum using an electromagnetic instrument tracker. J Urol 188:919–923
Windholz G (1996) Pavlov’s conceptualization of the dynamic stereotype in the theory of higher nervous activity. Am J Psychol 109:287–295
Karafantis DM (2011) The effects of ethnocultural empathy on level of stereotyping toward college athletes. J Evid Based Soc Work 8:426–444
Zihni AM, Ohu I et al (2014) Ergonomic analysis of robot-assisted and traditional laparoscopic procedures. Surg Endosc 28:3379–3384
Park A, Lee G et al (2010) Patients benefit while surgeons suffer: an impending epidemic. J Am Coll Surg 210:06–13
Acknowledgments
Kun Yang is supported by a fellowship provided by the China Scholarship Council for studies at Lorraine University, Nancy, France.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosures
Drs. Kun Yang, Manuela Perez, Gabriela Hossu, Nicolas Hubert, Cyril Perrenot, and Jacques Hubert have no conflicts of interest or financial ties to disclose.
Rights and permissions
About this article

Cite this article
Yang, K., Perez, M., Hossu, G. et al. “Alarm-corrected” ergonomic armrest use could improve learning curves of novices on robotic simulator. Surg Endosc 31, 100–106 (2017). https://doi.org/10.1007/s00464-016-4934-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-016-4934-6