
Abstract
For a Riemannian metric g on the two-sphere, let \(\ell _{\min }(g)\) be the length of the shortest closed geodesic and \(\ell _{\max }(g)\) be the length of the longest simple closed geodesic. We prove that if the curvature of g is positive and sufficiently pinched, then the sharp systolic inequalities
hold, and each of these two inequalities is an equality if and only if the metric g is Zoll. The first inequality answers positively a conjecture of Babenko and Balacheff. The proof combines arguments from Riemannian and symplectic geometry.
Similar content being viewed by others

References
Abbondandolo, A., Bramham, B., Hryniewicz, U.L., Salomão, P.A.S.: Sharp systolic inequalities for Reeb flows on the three-sphere (2015). arXiv:1504.05258 [math.SG]
Aleksandrov, A.D.: Vnutrennyaya Geometriya Vypuklyh Poverhnosteĭ [translated as: Intrinsic geometry of convex surfaces. In: Aleksandrov, A.D. (ed.) Selected Works, Part II. Chapman & Hall/CRC (2006) OGIZ, Moskow-Leningrad, 1948
Álvarez, J.C., Álvarez Paiva, J.C., Balacheff, F.: Contact geometry and isosystolic inequalities. Geom. Funct. Anal. 24, 648–669 (2014)
Balacheff, F.: Sur la systole de la sphère au voisinage de la métrique standard. Geom. Dedicata 121, 61–71 (2006)
Balacheff, F.: A local optimal diastolic inequality on the two-sphere. J. Topol. Anal. 2, 109–121 (2010)
Bangert, V.: On the existence of closed geodesics on two-spheres. Int. J. Math. 4, 1–10 (1993)
Birkhoff, G.D.: Dynamical Systems. Amer. Math. Soc. Colloquium Publ., American Mathematical Society, Providence (1927)
Boothby, W.M., Wang, H.C.: On contact manifolds. Ann. Math. 68, 721–734 (1958)
Burns, K., Matveev, V.S.: Open problems and questions about geodesics (2013). arXiv:1308.5417 [math.DG]
Calabi, E.: On the group of automorphisms of a symplectic manifold. In: Problems in Analysis, pp. 1-26 (Lectures at the Sympos. in honor of Salomon Bochner). Princeton University Press, Princeton (1970)
Calabi, E., Cao, J.: Simple closed geodesics on convex surfaces. J. Differ. Geom. 36, 517–549 (1992)
Cheeger, J., Ebin, D.G.: Comparison Theorems in Riemannian Geometry. North Holland Publishing Co., Amsterdam-Oxford (1975)
Croke, C.B.: Area and length of the shortest closed geodesic. J. Differ. Geom. 18, 1–21 (1988)
Fathi, A.: Transformations et homéomorphismes préservant la mesure. Systèmes dynamiques minimaux. Ph.D. thesis, Orsay (1980)
Gambaudo, J.-M., Ghys, E.: Enlacements asymptotiques. Topology 36, 1355–1379 (1995)
Geiges, H.: An Introduction to Contact Topology. Cambridge Studies in Advanced Mathematics, vol. 109. Cambridge University Press, Cambridge (2008)
Guillemin, V.: The Radon transform on Zoll surfaces. Adv. Math. 22, 85–119 (1976)
Klingenberg, W.: Contributions to Riemannian geometry in the large. Ann. Math. 69, 654–666 (1959)
Klingenberg, W.: Riemannian Geometry. Walter de Gruyter & Co., Berlin (1982)
Kobayashi, S.: Principal fiber bundles with the 1-dimensional toroidal group. Tôhoku Math. J. (2) 8, 29–45 (1956)
McDuff, D., Salamon, D.: Introduction to Symplectic Topology. Oxford Mathematical Monographs, 2nd edn. The Clarendon Press, Oxford University Press, New York (1998)
Nabutovski, A., Rotman, R.: The length of the shortest closed geodesic on a 2-dimensional sphere. Int. Math. Res. Not. (IMRN) 2002, 1211–1222 (2002)
Rotman, R.: The length of a shortest closed geodesic and the area of a 2-dimensional sphere. Proc. Am. Math. Soc. 134, 3041–3047 (2006)
Sabourau, S.: Filling radius and short closed geodesics of the 2-sphere. Bull. Soc. Math. France 132, 105–136 (2004)
Sabourau, S.: Local extremality of the Calabi–Croke sphere for the length of the shortest closed geodesic. J. Lond. Math. Soc. 82, 549–562 (2010)
Schröder, J.P.: Ergodicity and topological entropy of geodesic flows on surfaces. J. Mod. Dyn. 9, 147–167 (2015)
Weinstein, A.: On the volume of manifolds all of whose geodesics are closed. J. Differ. Geom. 9, 513–517 (1974)
Weinstein, A.: Fourier integral operators, quantization, and the spectra of Riemannian manifolds. Géométrie symplectique et physique mathématique (Colloq. Internat. CNRS, No. 237, Aix-en-Provence, 1974), Éditions Centre Nat. Recherche Sci. 289–298 (1975)
Acknowledgments
A. A. wishes to thank Juan Carlos Álvarez Paiva for sharing with him his view of systolic geometry. U. H. is grateful to Samuel Senti for endless interesting discussions about the relations between systolic inequalities and ergodic theory, and for his interest in the paper. The present work is part of A. A.’s activities within CAST, a Research Network Program of the European Science Foundation. A. A. is also partially supported by the DFG Grant AB 360/1-1. U. H. is partially supported by the CNPq Grant 309983/2012-6. P. S. is partially supported by the CNPq Grant No. 301715/2013-0 and by the FAPESP Grant No. 2013/20065-0.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Toponogov’s theorem and its consequences
This appendix is devoted to explaining how to estimate lengths of convex geodesic polygons using a relative version of Toponogov’s theorem.
1.1 Geodesic polygons and their properties
For this discussion we fix a Riemannian metric g on \(S^2\). The following definitions are taken from [12].
Definition A.1
Let \(X\subset S^2\).
-
(i)
X is strongly convex if for every pair of points p, q in X there is a unique minimal geodesic from p to q, and this geodesic is contained in X.
-
(ii)
X is convex if for every p in \(\overline{X}\) there exists \(r>0\) such that \(B_r(p)\cap X\) is strongly convex.
When \(p\in S^2\) and \(u,v \in T_pS^2\) are non-colinear vectors, consider the sets
When \(u\in T_pS^2{\setminus }\{0\}\) consider also
A corner of a unit speed broken geodesic \(\gamma :\mathbb {R}/L\mathbb {Z}\rightarrow S^2\) is a point \(\gamma (t)\) such that \(\gamma _+'(t)\not \in \mathbb {R}^+\gamma _-'(t)\), where \(\gamma '_\pm \) denote one-sided derivatives.
Definition A.2
\(D\subset S^2\) is said to be a geodesic polygon if it is the closure of an open disk bounded by a simple closed unit speed broken geodesic \(\gamma :\mathbb {R}/L\mathbb {Z}\rightarrow S^2\). We call D convex if for every corner \(p=\gamma (t)\) of \(\gamma \) we find \(0<r<\mathrm{inj}_p\) small enough such that \(D\cap B_r(p) = \exp _p(\Delta _r(-\gamma _-'(t),\gamma _+'(t)))\). The corners of \(\gamma \) are called vertices of D, and a side of D is a smooth geodesic arc contained in \(\partial D\) connecting two adjacent vertices.
Jordan’s theorem ensures that every simple closed unit speed broken geodesic is the boundary of exactly two geodesic polygons. At each boundary point which is not a vertex the inner normals to the two polygons are well-defined and opposite to each other.
It is well-known that \(B_r(p)\) is strongly convex when r is small enough. By the following lemma the same property holds for \(\exp _p(\Delta _r(u,v))\) and \(\exp _p(H_r(u))\).
Lemma A.3
Choose p in \(S^2\) and let \(0<r<\mathrm{inj}(g)\). If \(B_r(p)\) is strongly convex then \(\exp _p(\Delta _r(u,v))\) and \(\exp _p(H_r(u))\) are strongly convex for all pairs \(u,v\in T_pS^2\) of non-colinear vectors.
Proof
There is no loss of generality to assume that u, v are unit vectors. We argue indirectly. Assume that \(y,z\in \exp _p(\Delta _r(u,v))\) are points for which the minimal geodesic \(\gamma \) from y to z (with unit speed) is not contained in \(\exp _p(\Delta _r(u,v))\). Let \(\gamma _u\) and \(\gamma _v\) be the geodesic segments \(\exp _p(\tau u)\), \(\exp _p(\tau v)\) respectively, \(\tau \in (-r,r)\). Note that \(\gamma \) is contained in \(B_r(p)\) and, consequently, \(\gamma \) must intersect one of the geodesic segments \(\gamma _u\) or \(\gamma _v\) in two points \(a\ne b\). Thus we have found two geodesic segments from a to b which are length minimisers in \(S^2\) (one is contained in \(\gamma \) and the other is contained in \(\gamma _u\) or \(\gamma _v\)). This contradicts the fact that \(B_r(p)\) is strongly convex. The argument to prove strong convexity of \(\exp _p(H_r(u))\) is analogous. \(\square \)
As an immediate consequence we have the following:
Corollary A.4
A convex geodesic polygon \(D\subset S^2\) is convex.
Let d(p, q) denote the g-distance between points \(p,q\in S^2\).
Lemma A.5
Let D be a convex geodesic polygon. Then there exists a positive number \(\epsilon _1<\mathrm{inj}(g)\) such that if p, q are in D and satisfy \(d(p,q) \le \epsilon _1\), then the (unique) minimal geodesic from p to q lies in D.
Proof
If not we find \(p_n,q_n\in D\) such that \(d(p_n,q_n)\rightarrow 0\) and the minimal geodesic \(\gamma _n\) in \(S^2\) from \(p_n\) to \(q_n\) intersects \(S^2{\setminus } D\). Thus, up to selection of a subequence, we may assume that \(p_n,q_n \rightarrow x\in \partial D\). If x is not a corner of \(\partial D\) then we consider the unit vector \(n\in T_xS^2\) pointing inside D normal to the boundary and note that, for some \(r>0\) small, \(D\cap B_r(x)=\exp _x(H_r(n))\) is strongly convex. Here we used Lemma A.3. This is in contradiction to the fact that \(p_n,q_n\in D\cap B_r(x)\) when n is large. Similarly, if x is a corner of \(\partial D\) then, in view of the same lemma, we find unit vectors \(u,v\in T_xS^2\) and r very small such that \(D\cap B_r(x)=\exp _x(\Delta _r(u,v))\) is strongly convex. This again provides a contradiction. \(\square \)
The next lemma shows that a convex geodesic polygon is ‘convex in the large’.
Lemma A.6
Let D be a convex geodesic polygon. Then for every p and q in D there is a smooth geodesic arc \(\gamma \) from p to q satisfying
-
(i)
\(\gamma \subset D\).
-
(ii)
\(\gamma \) minimises length among all piecewise smooth curves inside D from p to q.
Proof
The argument follows a standard scheme. Consider a partition P of [0, 1] given by \(t_0=0<t_1<\cdots <t_{N-1}<t_N=1\), with norm
Let \(\Lambda _P\) be the set of continuous curves \(\alpha :[0,1]\rightarrow S^2\) such that each \(\alpha |_{[t_i,t_{i+1}]}\) is smooth, \(\alpha (0)=p\), \(\alpha (1)=q\). On \(\Lambda _P\) we have the usual length and energy functionals
Set
As usual, we use superscritps \(\le a\) to indicate sets of paths satisfying \(E\le a\).
If \(\alpha \) is in \(\Lambda _P^{\le a}\) and \(\sqrt{\Vert P\Vert } \le \epsilon _1/\sqrt{2a}\), then \(d(\alpha (t_i),\alpha (t_{i+1})) \le \epsilon _1 \ \forall i\), where \(\epsilon _1>0\) is the number given by Lemma A.5. Thus, for every \(\alpha \in \Lambda ^{\le a}_P(D)\) we find \(\gamma \in B_P(D)\) such that each \(\gamma |_{[t_i,t_{i+1}]}\) is a constant-speed reparametrization of the unique minimal geodesic arc from \(\alpha (t_i)\) to \(\alpha (t_{i+1})\). Here we have used Lemma A.5 to conclude that \(\gamma ([0,1]) \subset D\). Clearly \(L[\gamma ]\le L[\alpha ]\), so minimizing L on \(\Lambda _P^{\le a}(D)\) amounts to minimizing L on \(B_P^{\le a}(D)\). Now pick \(a>0\) and a partition P such that \(\Lambda _P^{\le a}(D)\ne \emptyset \) and \(\sqrt{\Vert P\Vert } \le \epsilon _1/\sqrt{2a}\). By the above argument, \(B_P^{\le a}(D)\ne \emptyset \) and, as usual, the map \(\gamma \mapsto (\gamma (t_1),\ldots ,\gamma (t_{N-1}))\) is a bijection between \(B_P^{\le a}(D)\) and a certain closed subset of \(D^{N-1}\). The topology which \(B_P^{\le a}(D)\) inherits from this identification makes L continuous. Thus, by compactness, we find \(\gamma _*\in B^{\le a}_P(D)\) which is an absolute minimiser of L over \(\Lambda _P^{\le a}(D)\).
We claim that \(\gamma _*\) is smooth, i.e., it has no corners. In fact, arguing indirectly, suppose it has a corner, which either lies on \(\mathrm{int}(D)\) or on \(\partial D\). In both cases we can use the auxiliary claim below to find a variation of \(\gamma _*\) through paths in \(B^{\le a}_P(D)\) that decreases length; the convexity of D is strongly used. This is a contradiction, and the smoothness of \(\gamma _*\) is established.
Auxiliary Claim. Consider \(a<x<b\) and a broken geodesic \(\beta :[a,b]\rightarrow S^2\), which is smooth and non-constant on [a, x] and on [x, b], satisfying \(\beta '_+(x) \not \in \mathbb {R}^+\beta '_-(x)\). Let \(\alpha :(-\epsilon ,\epsilon )\times [a,b]\rightarrow S^2\) be a piecewise smooth variation with fixed endpoints of \(\beta \) (\(\alpha (0,\cdot )=\beta \)) by broken geodesics such that \(\alpha \) is smooth on \((-\epsilon ,\epsilon )\times [a,x]\) and on \((-\epsilon ,\epsilon )\times [x,b]\). If \( D_1\alpha (0,x)\) is a non-zero vector in \(\Delta (-\beta '_-(x),\beta '_+(x))\), then \(\frac{d}{ds}|_{s=0}L[\alpha (s,\cdot )]<0\). In fact, the first variation formula gives us
as desired. \(\square \)
It remains to be shown that \(\gamma _*\) is an absolute length minimiser among all piecewise smooth curves in D joining p to q. Let \(\alpha \) be such a curve, which must belong to \(\Lambda _Q^{\le b}(D)\) for some positive number b and some partition Q. Up to increasing b and refining Q, we may assume that \(b\ge a\), \(Q\supset P\), and \(\sqrt{\Vert Q\Vert } \le \epsilon _1/\sqrt{2b}\). By the previously explained arguments we can find a smooth geodesic \(\tilde{\gamma }\) from p to q in D which is a global minimiser of L over \(\Lambda ^{\le b}_Q(D)\). Since \(\Lambda ^{\le a}_P(D)\) is contained in \(\Lambda ^{\le b}_Q(D)\), we must have \(L[\tilde{\gamma }]\le L[\gamma _*]\). Noting that \(\gamma _*,\tilde{\gamma }\) are smooth geodesics, we compute \(E[\tilde{\gamma }]=\frac{1}{2}L[\tilde{\gamma }]^2\le \frac{1}{2}L[\gamma _*]^2= E[\gamma _*]\) and conclude that \(\tilde{\gamma }\in \Lambda _P^{\le a}(D)\). Thus \(L[\gamma _*]=L[\tilde{\gamma }]\le L[\alpha ]\) as desired. \(\square \)
Lemma A.7
If D is a convex geodesic polygon in \((S^2,g)\), p and q are distinct points of \(\partial D\), and d is the distance from p to q relative to D then the following holds: a unit speed geodesic \(\gamma :[0,d]\rightarrow D\) from p to q minimal relative to D (which exists and is smooth in view of Lemma A.6) is injective, and satisfies either \(\gamma ((0,d)) \subset \mathrm{int}(D)\) or \(\gamma ([0,d])\subset \partial D\). In the former case \(\gamma \) divides D into two convex geodesic polygons \(D',D''\) satisfying \(D=D'\cup D''\), \(\gamma =D'\cap D''\); moreover, a geodesic between two points of \(D'\) (\(D''\)) which is minimal relative to D is contained in \(D'\) (\(D''\)). In the latter case there are no vertices of D in \(\gamma ((0,d))\).
Proof
If there exists t in (0, d) such that \(\gamma (t)\) belongs to \(\partial D\), then either \(\gamma (t)\) is a vertex or not. But it can not be a vertex since in this case \(\gamma '(t)\) would be colinear to one of the tangent vectors of \(\partial D\) at \(\gamma (t)\), allowing us to find \(t'\) close to t such that \(\gamma (t')\) is not in D. Not being a vertex, \(\gamma (t)\) is a point of tangency with \(\partial D\). By uniqueness of solutions of ODEs, we must have \(\gamma ([0,d])\subset \partial D\), hence D has no vertices in \(\gamma ((0,d))\). By minimality \(\gamma \) has to be injective. If \(\delta ',\delta ''\) are the two distinct arcs on \(\partial D\) from p to q and \(\gamma ((0,d)) \cap \partial D=\emptyset \) then \(\delta '\cup \gamma \) and \(\delta ''\cup \gamma \) bound disks \(D',D''\subset D\) which are clearly geodesic convex polygons. Let \(\alpha \subset D\) be a (smooth) geodesic arc connecting distinct points of \(D'\) minimal relative to D. If \(\alpha \not \subset D'\) then \(\alpha \) intersects \(\gamma ((0,d))\) transversally at (at least) two distinct points \(x\ne y\). By minimality, there are subarcs of \(\alpha \) and of \(\gamma \) from x to y with the same length. Thus, one can use these transverse intersections in a standard fashion to find a smaller curve in D connecting the end points of \(\alpha \), contradicting its minimality. \(\square \)
Lemma A.8
If the Gaussian curvature of g is everywhere not smaller than \(H>0\) then any two points \(p,q\in D\) can be joined by a smooth geodesic arc \(\gamma \) satisfying \(\gamma \subset D\), \(L[\gamma ]\le \pi /\sqrt{H}\).
Proof
According to Lemma A.6 we can find a smooth geodesic arc \(\gamma :[0,1]\rightarrow D\) from p to q which is length minimizing among all piecewise smooth curves from p to q inside D. If \(L[\gamma ]>\pi /\sqrt{H}\) then for every \(\epsilon >0\) small enough we can find \(t_\epsilon \in (\epsilon ,1)\) such that \(\gamma (t_\epsilon )\) is conjugated to \(\gamma (\epsilon )\) along \(\gamma |_{[\epsilon ,t_\epsilon ]}\). Note that either \(\gamma \) is contained in a single side of D or \(\gamma \) maps (0, 1) into \(\mathrm{int}(D)\). In latter case we use a Jacobi field J along \(\gamma |_{[\epsilon ,t_\epsilon ]}\) satisfying \(J(\epsilon )=0\), \(J(t_\epsilon )=0\) to construct an interior variation of \(\gamma \) which decreases length, a contradiction. In the former note that, perhaps up to a change of sign, J can be arranged so that it produces variations into D which decrease length, again a contradiction. \(\square \)
Before moving to Toponogov’s theorem and its consequence, we take a moment to study convex geodesic polygons on the 2-sphere equipped with its metric of constant curvature \(H>0\). This space is realised as a spherical shell of radius \(H^{-1/2}\) sitting inside the euclidean 3-space, and will be denoted by \(S_H\).
Lemma A.9
Let D be a convex geodesic polygon in \(S_H\). Then the following hold.
-
(i)
D coincides with the intersection of the hemispheres determined by its sides and the corresponding inward-pointing normal directions.
-
(ii)
The total perimeter of \(\partial D\) is not larger than \(2\pi /\sqrt{H}\).
-
(iii)
If D has at least two sides then all sides of D have length at most \(\pi /\sqrt{H}\).
Proof
Assertion (iii) is obvious. The argument to be given below to prove (i) and (ii) is by induction on the number n of sides of D. The cases \(n=1,2,3\) are obvious.
Now fix \(n>3\) and assume that (i), (ii) and (iii) hold for cases with \(j<n\) sides. Let p, q, r be three consecutive vertices of D, so that minimal geodesic arcs \(\gamma _{pq},\gamma _{qr}\) from p to q and from q to r, respectively, can be taken as two consecutive sides of D. Here we used that sides have length at most \(\pi /\sqrt{H}\). Let \(\gamma _1,\ldots ,\gamma _{n-2}\) be the other sides of D and denote by \(H_{pq},H_{qr},H_1,\ldots ,H_{n-2}\) the corresponding hemispheres determined by these sides and D.
We argue indirectly to show that \(D\subset H_{pq}\cap H_{qr}\). If \(x\in D{\setminus } (H_{pq}\cap H_{qr})\), consider a smooth geodesic arc \(\gamma \) from x to q inside D which minimises length among piecewise smooth paths in D. \(\gamma \) exists by Lemma A.6 and, by the Lemma A.8, \(L[\gamma ]\le \pi /\sqrt{H}\). Since x is not antipodal to q we have \(L[\gamma ]<\pi /\sqrt{H}\) which implies that \(\gamma \) is the unique minimal geodesic from x to q in \(S_H\). Combining \(x\not \in H_{pq}\cap H_{qr}\) and Definition A.2 one concludes that \(\gamma \) is not contained in D, a contradiction. Repeating this argument for all triples of consecutive vertices we find that
Now let \(\gamma _{pr}\subset D\) be the smooth geodesic arc from p to r which is minimal relatively to D. This arc exists by Lemma A.6. Moreover, \(\gamma _{pr} {\setminus } \{p,r\} \subset \mathrm{int}(D)\) since otherwise, by the previous lemma, \(\gamma _{pr}\subset \partial D\) contradicting the fact that \(n>3\). Note that \(\gamma _{pr}\) divides D into \(D=D'\cup T\), where \(D'\) is a convex geodesic polygon with sides \(\gamma _{pr},\gamma _1,\ldots ,\gamma _{n-2}\), and T is the convex geodesic triangle bounded by \(\gamma _{pq},\gamma _{qr},\gamma _{pr}\). Finally, let \(H_{pr}\) be the hemisphere determined by \(\gamma _{pr}\) and \(D'\), and let \(H'_{pq}\) be the closure of \(S_H{\setminus } H_{pr}\). By the induction step \(D'=H_{pr}\cap H_1\cap \cdots \cap H_{n-2}\), and \(T=H_{pq}\cap H_{qr} \cap H'_{pr}\). Thus
Hence (67) and (68) prove that (i) holds for all convex geodesic polygons with at most n sides.
To prove (ii) we again assume \(n>3\) and consider a, b, c, d four consecutive vertices of D, the consecutive sides \(\gamma _{ab},\gamma _{bc},\gamma _{cd}\) connecting them, and let \(\gamma _1,\ldots ,\gamma _{n-3}\) be the other sides of D. Let \(H_{bc}\) be the hemisphere containing D whose equator contains \(\gamma _{bc}\), and let \(H_{bc}'\) be the closure of \(S_H{\setminus } H_{bc}\). Continue \(\gamma _{ab}\) along b and \(\gamma _{cd}\) along c till they first meet at a point \(e\in \mathrm{int}(H'_{bc})\). If \(\gamma _{be},\gamma _{ec}\) are the minimal arcs connecting b to e and e to c, respectively, and T is the convex triangle with sides \(\gamma _{be},\gamma _{ec},\gamma _{bc}\), then we claim that \(F=D\cup T\) is a convex geodesic polygon with \(n-1\) sides. To see this the reader will notice that the closed curve \(\alpha =\gamma _{ab}\cup \gamma _{be} \cup \gamma _{ec}\cup \gamma _{cd} \cup \gamma _1\cup \cdots \cup \gamma _{n-3}\) is simple since \(T\subset H'_{bc}\) and \(D\subset H_{bc}\) (D satisfies (i)), and \(\alpha = \partial F\). By the induction step \(\alpha \) has length \(<2\pi /\sqrt{H}\) and, since \(\gamma _{bc}\) is minimal, the length of \(\partial D\) is smaller than that of \(\alpha \). \(\square \)
1.2 The relative Toponogov’s Theorem
Toponogov’s triangle comparison theorem is one of the most important tools in global Riemannian geometry. In the case of convex surfaces, it had been previously proven by Aleksandrov in [2]. Here we need a relative version for triangles in convex geodesic polygons sitting inside positively curved two-spheres.
We fix a metric g on \(S^2\), a convex geodesic polygon \(D\subset S^2\), and follow [12] closely. However, we need to work with distances relative to D. For instance given points of D, the distance between them relative to D is defined to be the infimum of lengths of piecewise smooth paths in D connecting these points. Lemma A.5 tells us that the relative distance is realised by a smooth geodesic arc contained in D. We say that a (smooth) geodesic arc between two points of D is minimal relative to D if it realises the distance relative to D.
A geodesic triangle in D is a triple of non-constant geodesic arcs \((c_1,c_2,c_3)\) parametrised by arc-length, \(c_i:[0,l_i]\rightarrow S^2\) (\(l_i\) is the length of \(c_i\)), satisfying \(c_i([0,l_i])\subset D\), \(c_i(l_i)=c_{i+1}(0)\) and the triangle inequalities \(l_i\le l_{i+1}+l_{i+2}\) (indices modulo 3). These arcs may or may not self-intersect and intersect each other. The angle \(\alpha _i\in [0,\pi ]\) is defined as the angle between \(-c_{i+1}'(l_{i+1})\) and \(c_{i+2}'(0)\) (indices modulo 3).
Theorem A.10
(Relative Toponogov’s Theorem) Let g be a Riemannian metric on \(S^2\) with Gaussian curvature pointwise bounded from below by a constant \(H>0\), and let \(D\subset S^2\) be a convex geodesic polygon. If \((c_1,c_2,c_3)\) is a geodesic triangle in D such that \(c_1,c_3\) are minimal relative to D and \(l_2\le \pi /\sqrt{H}\), then for every \(0<\epsilon <H\) there exists a so-called comparison triangle \((\bar{c}_1,\bar{c}_2,\bar{c}_3)\) in \(S_{H-\epsilon }\) with angles \(\bar{\alpha }_1,\bar{\alpha }_2,\bar{\alpha }_3\) such that \(L[c_i]=L[\bar{c}_i]\) and \(\bar{\alpha }_i\le \alpha _i\), where \(\alpha _i\) are the angles of \((c_1,c_2,c_3)\).
In [19, page 297] Klingenberg observes that the relative version of Toponogov’s theorem holds, and that this observation is originally due to Alexandrov [2]. A proof of the above theorem would be too long to be included here, but the reader familiar with the arguments from [12] will notice two facts:
-
The proof from [12] for the case of complete Riemannian manifolds essentially consists of breaking the given triangle into many ‘thin triangles’ (these are given precise definitions in [12, chapter 2]), and the analysis of these thin triangles is done by estimating lengths of arcs which are \(C^0\)-close to them. Hence all estimates of the perimeters of these thin triangles are obtained relative to an arbitrarily small neighborhood of the given convex geodesic polygon.
-
Distances relative to the convex geodesic polygon are only at most a little larger than distances relative to a very small neighborhood of the convex geodesic polygon. This is easy to prove since we work in two dimensions.
Putting these remarks together the relative version of Toponogov’s theorem can be proved using the arguments from [12].
Remark A.11
A geodesic triangle in \(S_{H-\epsilon }\) with sides of length at most \(\pi /\sqrt{H}\), either is contained in a great circle, or its sides bound a convex geodesic polygon.
1.3 The perimeter of a convex geodesic polygon
Theorem A.12
Let \((S^2,g)\) be a Riemannian two-sphere such that the Gaussian curvature is everywhere bounded from below by \(H>0\). If D is a convex geodesic polygon in \((S^2,g)\) then the perimeter of \(\partial D\) is at most \(2\pi /\sqrt{H}\). The same estimate holds for the perimeter of a two-gon consisting of two non-intersecting simple closed geodesic loops based at a common point.
This is proved in [19, page 297] for the case \(\partial D\) is a closed geodesic (no vertices). We reproduce the argument here, observing that it also works for the general convex geodesic polygon.
Proof of Theorem A.12
Let \(d>0\) be the perimeter of \(\partial D\). We can parametrise \(\partial D\) as the image of a closed simple curve \(c:\mathbb {R}/d\mathbb {Z}\rightarrow S^2\) which is a broken unit speed geodesic. For each \(n\ge 1\) and \(k\ge 0\) we denote by \(\gamma _{k,2^n}\) a (smooth) geodesic arc from \(c(kd2^{-n})\) to \(c((k+1)d2^{-n})\) in D which minimises length relative to D. We make these choices \(2^n\)-periodic in k, \(\gamma _{k+2^n,2^n}=\gamma _{k,2^n}\), and also choose \(\gamma _{0,2}=\gamma _{1,2}\). We can assume that \(L[\gamma _{0,2}] < d/2\) since, otherwise, \(d/2\le L[\gamma _{0,2}] \le \pi /\sqrt{H}\) (Lemma A.8) and the proof would be complete. In particular, \(\gamma _{0,2}\) is not contained in \(\partial D\), and Lemma A.7 implies that \(\gamma _{0,2}\) touches \(\partial D\) only at its endpoints c(0), c(d / 2).
Notice that if the distance from \(c(kd2^{-n})\) to \(c((k+1)d2^{-n})\) relative to D is \(d2^{-n}\), then Lemma A.7 implies that \(c|_{[kd2^{-n},(k+1)d2^{-n}]}\) is a smooth geodesic arc. Therefore, we are allowed to make the following important choice:
(C) If the distance from \(c(kd2^{-n})\) to \(c((k+1)d2^{-n})\) relative to D is \(d2^{-n}\), then we choose \(\gamma _{k,2^n}=c|_{[kd2^{-n},(k+1)d2^{-n}]}\).
The above choice forces \(\gamma _{l,2^{n+m}}\) to be \(c|_{[ld2^{-n-m},(l+1)d2^{-n-m}]}\) for all \(k2^m\le l<(k+1)2^m\), whenever \(\gamma _{k,2^n}=c|_{[kd2^{-n}(k+1)d2^{-n}]}\).
For \(n\ge 2\) set \(D_n\) to be the subregion of D bounded by the simple closed broken geodesic \(\partial D_n = \cup \{\gamma _{k,2^n}\mid 0\le k <2^n\}\). It follows readily from Lemma A.7 that this is a convex geodesic polygon. Moreover, sides of \(D_n\) fall into two classes: either a side is not contained in \(\partial D\) and coincides precisely with \(\gamma _{k,2^n}\) for some k, or it lies in \(\partial D\) is a union of adjacent \(\gamma _{k,2^n}\cup \gamma _{k+1,2^n}\cup \cdots \cup \gamma _{k+m,2^n} \subset \partial D\) for some k and some m. By construction
-
(i)
\(D_n\subset D_{n+1}\) and \(L[\partial D_n]\rightarrow d\) as \(n\rightarrow \infty \).
-
(ii)
The vertices of \(D_n\) form a subset of \(\{c(kd2^{-n})\mid 0\le k<2^n\}\).
Fix \(0<\epsilon <H\). We would like to construct a sequence of convex geodesic polygons \(E_n \subset E_{n+1}\) in \(S_{H-\epsilon }\) such that \(L[\partial E_n] = L[\partial D_n]\).
Consider geodesic triangles \(T_{k,2^n}=(\gamma _{k,2^n},\gamma _{2k,2^{n+1}},\gamma _{2k+1,2^{n+1}})\) in the sense of Sect. A.2. The triangle inequalities hold, since all sides are minimal relative to D.
According to Theorem A.10, associated to \(T_{0,2},T_{1,2}\) there are comparison triangles \(\bar{T}_{0,2} = (\bar{\gamma }_{0,2},\bar{\gamma }_{0,4},\bar{\gamma }_{1,4})\), \(\bar{T}_{1,2} = (\bar{\gamma }_{1,2},\bar{\gamma }_{2,4},\bar{\gamma }_{3,4})\) in \(S_{H-\epsilon }\) with sides of same length as the corresponding sides in \(T_{0,2},T_{1,2}\). The angles of \(\bar{T}_{0,2},\bar{T}_{1,2}\) are not larger than the corresponding angles on \(T_{0,2},T_{1,2}\). Up to reflection and a rigid motion, we can assume \(\bar{\gamma }_{0,2}\) coincides with \(\bar{\gamma }_{1,2}\) (along with vertices corresponding to endpoints of \(\gamma _{0,2}=\gamma _{1,2}\)) on a given great circle e, and \(\bar{T}_{0,2},\bar{T}_{1,2}\) lie on opposing hemispheres determined by e. Of course, \(\bar{T}_{0,2}\) and/or \(\bar{T}_{1,2}\) could lie on e, but this forces \(L[\gamma _{0,2}]\) to be d / 2, a case we already treated. Again the angle comparison can be used to deduce that \(E_2 := \bar{T}_{0,2}\cup \bar{T}_{1,2}\) is a convex geodesic polygon in \(S_{H-\epsilon }\) with the same perimeter as \(D_2\) (\(\partial E_2 = \cup _{k=0}^3 \bar{\gamma }_{k,4}\)).
To construct \(E_3\), note that each side of \(D_2\) not contained in \(\partial D\) is of the form \(\gamma _{k,4}\) for some fixed \(0\le k<4\). There is a corresponding side \(\bar{\gamma }_{k,4}\) of \(E_2\), by construction and angle comparison. By Lemma A.7 \(\gamma _{k,4}\) divides D into two convex geodesic polygons, only one of which, denoted by \(D_{k,4}\), contains \(c([kd/4,(k+1)d/4])\) in its boundary. By the same lemma, \(T_{k,4}\) is contained in \(D_{k,4}\) (and determines a convex geodesic polygon). By the relative Toponogov theorem, there exists a comparison triangle \(\bar{T}_{k,4}\) which we can assume is of the form \((\bar{\gamma }_{k,4},\bar{\gamma }_{2k,8},\bar{\gamma }_{2k+1,8})\), i.e. one of its sides matches precisely the side \(\bar{\gamma }_{k,4}\) of \(E_2\) together with corresponding vertices of \(\bar{\gamma }_{k,4}\). Moreover, possibly after reflection, we can assume \(E_2\) and \(\bar{T}_{k,4}\) lie on the opposing hemispheres determined by the great circle containing \(\bar{\gamma }_{k,4}\). This last step strongly uses Lemma A.9 and Remark A.11. Again by the angle comparison, \(E_2\cup \bar{T}_{k,4}\) is a convex geodesic polygon in \(S_{H-\epsilon }\) with the same perimeter as the convex geodesic polygon \(D_2\cup T_{k,4}\). Repeating this procedure for another side of \(D_2\) not in \(\partial D\), which is of the form \(\gamma _{k',4}\) for some \(k'\ne k\), with \(E_2\cup \bar{T}_{k,4}\) in the place of \(E_2\), we obtain a larger geodesic convex polygon \(E_2\cup \bar{T}_{k,4}\cup \bar{T}_{k',4}\) in \(S_{H-\epsilon }\) with the same perimeter as the geodesic convex polygon \(D_2\cup T_{k,4}\cup T_{k',4}\). After exhausting all the sides of \(D_2\) not in \(\partial D\) we complete the construction of \(E_3\).
The construction of \(E_n\) from \(D_{n-1},E_{n-1}\) follows the same algorithm, since sides of \(D_{n-1}\) not in \(\partial D\) must be of the form \(\gamma _{k,2^{n-1}}\) for some \(0\le k<2^{n-1}\). In this case, there will be a corresponding side \(\bar{\gamma }_{k,2^{n-1}}\) of \(E_{n-1}\) with the same length as \(\gamma _{k,2^{n-1}}\) along which we fit the comparison triangle \(\bar{T}_{k,2^{n-1}}\) obtained by applying the relative Toponogov theorem to \(T_{k,2^{n-1}}\). Doing this step by step at each side of \(D_{n-1}\) not in \(\partial D\) we obtain \(E_n\).
By Lemma A.9 we know that
Together with (i) above, we deduce that \(L[\partial D]\le 2\pi /\sqrt{H-\epsilon }\). Letting \(\epsilon \downarrow 0\) we get the desired estimate.
To get the estimate for the two-gon as in the statement note that its perimeter can clearly be approximated by the perimeter of convex geodesic polygons. \(\square \)
Appendix B: Zoll geodesic flows on the two-sphere
Given a Riemannian metric g on \(S^2\), we denote by \(T^1 S^2(g)\) the corresponding unit tangent bundle. The Hilbert 1-form on \(TS^2\) is the pull-back of the standard Liouville form \(p\, dq\) on \(T^* S^2\) by the isomorphism \(TS^2 \cong T^* S^2\) induced by the metric g (see also the end of Sect. 3.1 for an equivalent definition). This 1-form restricts to a contact form \(\alpha _g\) on \(T^1 S^2(g)\) whose Reeb flow is the geodesic flow on \(T^1 S^2(g)\). We recall that the geodesic equation induces also a Hamiltonian flow on \(T^* S^2\), which is determined by the standard symplectic structure on \(T^* S^2\) and by the Hamiltonian
where \(g^*\) is the metric on the vector bundle \(T^* S^2\) which is dual to g. By pushing this Hamiltonian flow forward to \(TS^2\) by the isomorphism \(T^* S^2 \cong T S^2\) which is induced by g and by restriction to tangent vectors of norm one, we obtain precisely the geodesic flow on \(T^1 S^2(g)\). The aim of this appendix is to present a full proof of the following result:
Theorem B.1
Let g be a metric on \(S^2\) all of whose geodesics are closed and have length \(2\pi \). Then
and there is a diffeomorphism
such that \(\varphi ^* \alpha _g = \alpha _{g_{\mathrm {round}}}\). In particular, \(\varphi \) conjugates the geodesic flows of \(g_{\mathrm {round}}\) and g. Furthermore, there is a symplectomorphism
such that \(\psi ^* H_g = H_{g_{\mathrm {round}}}\). Here \(\mathbb {O}\) denotes the zero section of \(T^* S^2\). In particular, \(\psi \) conjugates the Hamiltonian flows of \(H_{g_{\mathrm {round}}}\) and \(H_g\) away from the zero section.
The statement about the area of g is proved (for more general Zoll manifolds) by Weinstein in [27]. The existence of a conjugacy is also proved by Weinstein (again for more general Zoll manifolds) in [28], but assuming the existence of a path of Zoll metrics connecting \(g_{\mathrm {round}}\) to g. See also [17] [Appendix B]. In the special case of \(S^2\) one does not need this assumption.
Before proving Theorem B.1, we study the contact manifold \((T^1 S^2(g_{\mathrm {round}}), \alpha _{g_{\mathrm {round}}})\). If we see \((S^2,g_{\mathrm {round}})\) as the unit sphere in \(\mathbb {R}^3\), the unit tangent bundle \(T^1 S^2(g_{\mathrm {round}})\) is naturally identified with the three-dimensional submanifold of \(\mathbb {R}^6\)
where \(|\cdot |\) and \(\cdot \) are the Euclidean norm and scalar product on \(\mathbb {R}^3\). Using this identification, the contact form \(\alpha _{g_{\mathrm {round}}}\) has the form
The above identification shows that \(T^1 S^2(g_{\mathrm {round}})\) is diffeomorrphic to SO(3) by the diffeomorphism
where \(\times \) is the vector product on \(\mathbb {R}^3\) and \([a \; b \; c]\) denotes the matrix with columns a, b, c. The push-forward of \(\alpha _{g_{\mathrm {round}}}\) by this diffeomorphism is the following contact form on SO(3)
where \(\{e_1,e_2,e_3\}\) is the standard basis of \(\mathbb {R}^3\). Its differential is the two-form
On SO(3) the geodesic flow of \(g_{\mathrm {round}}\) takes the form
The flow \(\phi _t\) defines a free \(\mathbb {T}\)-action on SO(3), where \(\mathbb {T}:= \mathbb {R}/2\pi \mathbb {Z}\). The quotient of SO(3) by this \(\mathbb {T}\)-action is \(S^2\), and the quotient projection is the map
Denote by \(\omega _0\) the standard area form of \(S^2\), namely
We claim that
In order to prove this identity, notice that \(d\alpha _0\) is invariant under the action of SO(3) by left multiplication: if \(T\in SO(3)\) and \(L_T\) is the map
then formula (70) shows that \(L_T^* d\alpha _0 = d\alpha _0\). Moreover, from the identity \(p_0 \circ L_T = T \circ p_0\) and from the fact that \(\omega _0\) is T-invariant we deduce that also \(p_0^* \omega \) is \(L_T\)-invariant:
Therefore, it is enough to check the validity of the identity (72) at the identity matrix \(I\in SO(3)\). Let H, K be two elements of the tangent space of SO(3) at I, that is, two skew-symmetric matrices
By (70) we have
On the other hand, from the form (71) of the projection \(p_0\) we find
The above two identities conclude the proof of (72).
The map \(p_0: SO(3) \rightarrow S^2\) defines a principal \(\mathbb {T}\)-bundle. The contact form \(\alpha _0\) is a connection 1-form on this principal bundle. By (72) the curvature 2-form \(d\alpha _0\) coincides with \(-p_0^* \omega _0\), and hence the Euler class of \(p_0\) is \([\omega _0/2\pi ]\). In particular, the Euler number of \(p_0\) is
We will deduce Theorem B.1 by the following general result:
Theorem B.2
Let \(\alpha \) be a contact form on SO(3) such that all the orbits of the corresponding Reeb flow are periodic and have minimal period \(2\pi \). Then
and there exists a diffeomorphism \(\varphi : SO(3) \rightarrow SO(3)\) such that \(\varphi ^* \alpha = \alpha _0\).
Proof of Theorem A.12
First notice that the thesis is true for the contact form \(\alpha =-\alpha _0\): indeed, (73) is trivial in this case, and the diffeomorphism
satisfies \(\varphi ^*(-\alpha _0) = \alpha _0\).
Now consider an arbitrary contact form \(\alpha \) on SO(3) satisfying the periodicity assumption. Up to the application of an orientation reversing diffeomorphism of SO(3), we may assume that \(\alpha \) and \(\alpha _0\) induce the same orientation, meaning that the volume forms \(\alpha \wedge d\alpha \) and \(\alpha _0 \wedge d\alpha _0\) differ by the multiplication by a positive function.
The Reeb flow of \(\alpha \) induces a smooth free \(\mathbb {T}\)-action on SO(3). The quotient B of SO(3) by this action is a smooth closed surface. Denote by
the quotient projection. By (the easy part of) a theorem of Boothby and Wang ([8], see also [16, Theorem 7.2.5]), p is a principal \(\mathbb {T}\)-bundle, \(\alpha \) is a connection 1-form on it, whose curvature form \(\omega \) is an area form on B satisfying
Moreover, the cohomology class \(-[\omega /2\pi ]\) is integral and coincides with the Euler class e of the \(\mathbb {T}\)-bundle.
In particular, B is orientable and from the exact homotopy sequence of fibrations
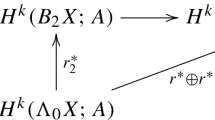
we deduce that \(\pi _2(B)=\mathbb {Z}\). Therefore, B is the two-sphere \(S^2\). From the Gysin sequence
we deduce that the cup product with the Euler class is the multiplication by \(\pm 2\), i.e. the Euler number of the \(\mathbb {T}\)-bundle p is \(\pm 2\). Then, choosing any orientation on SO(3), we can compute the total volume of \(\alpha \wedge d\alpha \) by fiberwise integration
and (73) follows. If we change \(\alpha \) by \(-\alpha \), then \(\omega \) becomes \(-\omega \) and hence the Euler number of p changes sign. Since \(\alpha \) and \(-\alpha \) induce the same orientation on SO(3), we may assume that the Euler number is 2: if in this case we do have a diffeomorphism \(\varphi \) such that \(\varphi ^* \alpha = \alpha _0\), then the same diffeomorphism pulls \(-\alpha \) back to \(-\alpha _0\), and we have already checked that \(-\alpha _0\) can be pulled back to \(\alpha _0\).
Therefore, in the sequel we assume that \(\alpha \) and \(\alpha _0\) induce the same orientation on SO(3) and that the Euler number of p is 2. Since the Euler number determines principal \(\mathbb {T}\)-bundles over \(S^2\) (see [20, Theorem 8]) and since we have checked above that the Euler number of \(p_0\) is 2, there is an isomorphism of principal \(\mathbb {T}\)-bundles

In particular, \(\psi \) is orientation preserving and intertwines generators of the \(\mathbb {T}\)-actions, that is, the Reeb vector fields of \(\alpha _0\) and \(\alpha \). Denote by R the Reeb vector field of \(\alpha _0\). Then R is also the Reeb vector field of the contact form
We claim that
is a contact form for every \(t\in [0,1]\). Since \(\psi \) is orientation preserving, we have
for some positive smooth function f. Fix some point A in SO(3) and let H, K be a basis of \(\ker \alpha _0(A)\) such that
where we are omitting to write the point A. Then \(R=R(A),H,K\) is a basis of the tangent space of SO(3) at A, and we have
Since R is the Reeb vector field of \(\alpha _1\), we also have
Therefore
By (74), (75) and (76) we obtain
Since the above quantity is positive for every \(t\in [0,1]\), \(\alpha _t\) is a contact form for t in this range, as claimed.
Now we proceed using Moser’s argument. Since \(d\alpha _t\) is non-degenerate on \(\ker \alpha _t\), we can find a unique (and hence smooth) vector field \(Y_t\) taking values in \(\ker \alpha _t\) and such that
Since both \(\imath _{Y_t} d\alpha _t\) and \(\alpha _0 - \alpha _1\) vanish on R, we can remove the restriction to \(\ker \alpha _t\) from the above identity:
Let \(\phi _t: SO(3) \rightarrow SO(3)\), \(t\in [0,1]\), be the one-parameter family of diffeomorphisms which solves the equation
By Cartan’s identity we get
where we have used (77) and the fact that \(\imath _{Y_t} \alpha _t = \alpha _t[Y_t]=0\), since \(Y_t\) is a section of \(\ker \alpha _t\). Since \(\phi _0^* \alpha _0 = \alpha _0\), we deduce that \(\phi _t^* \alpha _t = \alpha _0\) for every \(t\in [0,1]\). In particular,
and \(\varphi := \psi \circ \phi _1\) is the required diffeomorphism. \(\square \)
Proof of Theorem B.1
Using an arbitrary diffeomorphism between \(T^1 S^2(g)\) and SO(3) we identify also \(\alpha _g\) with a contact form \(\alpha \) on SO(3), which satisfies the assumptions of Theorem B.2. By Proposition 3.7 and (73) we have
which proves (69). The existence of a diffeomorphism
such that \(\varphi ^* \alpha _g = \alpha _{g_{\mathrm {round}}}\) is an immediate consequence of Theorem B.2. Since it intertwines the Reeb vector fields of \(\alpha _{g_{\mathrm {round}}}\) and \(\alpha _g\), this diffeomorphism conjugates the two geodesic flows. Let \(\tilde{\varphi }\) be the induced diffeomorphism between the unit cotangent bundles of \(S^2\) which are defined by the dual metrics \(g^*_{\mathrm {round}}\) and \(g^*\). The diffeomorphism \(\tilde{\varphi }\) intertwines the two restrictions of the standard Liouville form of \(T^* S^2\). The one-homogeneous extension
is a symplectomorphism and satisfies \(\psi ^* H_g = H_{g_{\mathrm {round}}}\). \(\square \)
Rights and permissions
About this article

Cite this article
Abbondandolo, A., Bramham, B., Hryniewicz, U.L. et al. A systolic inequality for geodesic flows on the two-sphere. Math. Ann. 367, 701–753 (2017). https://doi.org/10.1007/s00208-016-1385-2
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-016-1385-2