
Abstract
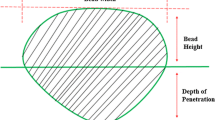
Evaluating the welding joint quality in real time is difficult for chassis parts robotic gas-shielded welding. Series of metal active gas (MAG) joints were conducted in this paper to investigate the relationship between welding current, welding speed, energy input, and weld bead geometry. Bead width and bead reinforcement are obtained using a line-structured light measurement method, and the penetration depth of the bead is measured with the macroscopic metallurgical microscope. The ratio of penetration depth to the plate thickness and reinforcement is chosen as the evaluation criterion of the joint quality. Based on XGBoost algorithm, two data-driven models are proposed to recognize penetration status and predict the bead reinforcement. In the prediction results, the absolute error of the penetration coefficient is 0.079 at the maximum, and the average relative error is 11.06%. For the test result of reinforcement prediction model, the relative error is 20.5% on average. The test results show that the XGBoost-based models can be used for real-time prediction of welding quality.
Similar content being viewed by others

References
Benyounis KY, Olabi AG (2008) Optimization of different welding processes using statistical and numerical approaches – a reference guide. Adv Eng Softw 39(6):483–496
Hsu YF, Rubinsky B, Mahin K (1986) An inverse finite element method for the analysis of stationary arc welding processes. J Heat Transf 108(4):734–741
Choudhury S, Sharma A, Mohanty UK, Kasai R, Komura M, Tanaka M (2017) Mathematical model of complex weld penetration profile: a case of square ac waveform arc welding. J Manuf Process 30:483–491
Tarng YS, Yang WH (1998) Optimisation of the weld bead geometry in gas tungsten arc welding by the Taguchi method. Int J Adv Manuf Technol 14(8):549–554
Palani PK, Murugan N (2006) Development of mathematical models for prediction of weld bead geometry in cladding by flux cored arc welding. Int J Adv Manuf Technol 30(7–8):669–676
Khanna P, Maheshwari S (2018) Development of mathematical models for prediction and control of weld bead dimensions in MIG welding of stainless steel 409M. Mater Today Proc 5(2):4475–4488
Prasad KS, Chalamalasetti SR, Damera NR (2015) Application of grey relational analysis for optimizing weld bead geometry parameters of pulsed current micro plasma arc welded inconel 625 sheets. Int J Adv Manuf Technol 78(1–4):625–632
Sharma A, Verma DK, Arora N (2016) A scheme of comprehensive assessment of weld bead geometry. Int J Adv Manuf Technol 82(9–12):1507–1515
Yan C (2004) CO2 welding spatter model based on partial least-squares regression. Trans China Weld Inst 25(5):125–128
Xu WH, Lin SB, Fan CL, Yang CL (2015) Prediction and optimization of weld bead geometry in oscillating arc narrow gap all-position GMA welding. Int J Adv Manuf Technol 79(1–4):183–196
Kim IS, Son JS, Yarlagadda PKDV (2003) A study on the quality improvement of robotic GMA welding process. Robot Comput Integr Manuf 19(6):567–572
Mirapeix J, García-Allende PB, Cobo A (2007) Real-time arc-welding defect detection and classification with principal component analysis and artificial neural networks. NDT E Int 40(4):315–323
Datta S, Bandyopadhyay A, Pal PK (2008) Grey-based Taguchi method for optimization of bead geometry in submerged arc bead-on-plate welding. Int J Adv Manuf Technol 39(11–12):1136–1143
Datta S, Nandi G, Bandyopadhay A, Pal PK (2009) Application of PCA-based hybid Taguchi method for correlated multicriteria optimization of submerged arc weld. Int J Adv Manuf Technol 45(3–4):276–286
Friedman JH (2001) Greedy function approximation: a gradient boosting machine. Ann Stat 29(5):1189–1232
Chen T, Guestrin C (2016) XGBoost: a scalable tree boosting system. ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. ACM: 785–794
Ke G, Meng Q, Finely T, Wang T, Chen W (2017) LightGBM: a highly efficient gradient boosting decision tree. 31st Conference on Neural Information Processing Systems
Chen S, Chen X, Li J, Lin T (2005) The research on acquisition of welding seam space position information for arc welding robot based on vision. J Intell Robot Syst 43:77–97
Muhammad J, Altun H, Abo-Serie E (2016) Welding seam profiling techniques based on active vision sensing for intelligent robotic welding. Int J Adv Manuf Technol 88(1–4)
Acknowledgements
The authors wish to thank Dr. Meng Kong and Dr. Jie Zhang for useful advice on this paper.
Funding
The authors are grateful for the financial support from the National Natural Science Foundation of China (Grant No. 51575348).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, K., Chen, H., Liu, L. et al. Prediction of weld bead geometry of MAG welding based on XGBoost algorithm. Int J Adv Manuf Technol 101, 2283–2295 (2019). https://doi.org/10.1007/s00170-018-3083-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-018-3083-6