
Abstract
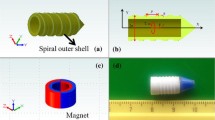
A noninvasive method to drive medical micro-robots into endocoeles has been proposed and a kind of medical micro robot driven by the method has been designed. The robot has a spirally grooved impeller. When the spirally grooved impeller rotates, a hydrodynamic film between the robot and endocoeles is formed because of mucus existence in endocoeles. The generated axial thrust force of the impeller can drive robots to move. Because the hydrodynamic film is formed when the robot moves in endocoeles, injury may be prevented, so it can alleviate or avoid pain of sufferers. The generated axial thrust force of the impeller has been estimated according to the hydrodynamic lubrication theory and has been confirmed by experiments.
Similar content being viewed by others


References
Dario, P., Guglielmelli, E., Allotta, B. et al., Robotics for medical applications, IEEE Robotics & Automation Magazine, 1996(3): 44.
Fujita Hiroyuki, Future of actuators and microsystems, Sensors and Actuators, 1996(A56): 105.
Gao, L. M., Lin, L. M., Yan, G. Z. et al., Study of endoscope system driven by squirmy robot, Chinese Journal of Biomedical Engineering (in Chinese), 1998(1): 36.
Bai, S. P., Wang, J. S., Zhang, B. P., The principle and realization of miniature worming robot, Robot (in Chinese), 1994(3): 140.
Yang, Y. M., Li, C. F., Cheng, L. L., Study on bionic-type stepping linear actuator, Robot (in Chinese), 1994(1): 37.
Yang, Z. G., He, W. D., Kang, X. T., Study on translational driving mechanism of moving minirobot, Robot (in Chinese), 1995(4): 200.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Zhou, Y., He, H., Gu, D. et al. Noninvasive method to drive medical micro-robots. Chin.Sci.Bull. 45, 617–620 (2000). https://doi.org/10.1007/BF02886037
Received:
Issue Date:
DOI: https://doi.org/10.1007/BF02886037