
Abstract
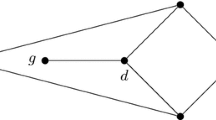
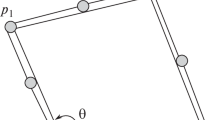
There exists a homeomorphism between any compact orientable closed surface and the configuration space of an appropriate mechanical linkage defined by a weighted graph embedded in the Euclidean plane.
Similar content being viewed by others

References
J. Bochnak, M. Coste and M.-F. Roy,Géométrie algébrique réelle, Springer-Verlag, Berlin, 1987.
J. Grosjean,Kinematics and Dynamics of Mechanisms. McGraw-Hill, London, 1991.
J.-C. Hausmann,Sur la topologie des bras articulés, Lecture Notes in Mathematics1474, Springer-Verlag, Berlin, 1989, pp. 146–159.
J.-C. Hausmann and A. Knutson,Polygon spaces and Grassmannians, L'Enseignement Mathématique (2)43 (1997), 173–198.
B. Jaggi,Punktmengen mit vorgeschriebenen Distanzen und ihre Konfigurationsräume, Inauguraldissertation, Universität Bern, 1992.
D. Jordan,Konfigurationsräume von Gelenkmechanismen, Diplomarbeit, Universität Bern, 1997.
D. Jordan and M. Steiner,Configuration spaces of mechanical linkages, Journal of Discrete and Computational Geometry22 (1999), 297–315.
M. Kapovich and J. Millson,On the moduli space of polygons in the Euclidean plane, Journal of Differential Geometry42 (1995), 133–164.
M. Kapovich and J. Millson,Universality theorems for configuration spaces of planar linkages, preprint, 1998.
M. Steiner,Realisierungsräume von gewichteten Graphen, Diplomarbeit, Universität Bern, 1997.
A. Wenger,Etudes des espaces de configurations de certains systèmes articulés, Travail de diplôme, Université de Genève, 1988.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Jordan, D., Steiner, M. Compact surfaces as configuration spaces of mechanical linkages. Isr. J. Math. 122, 175–187 (2001). https://doi.org/10.1007/BF02809898
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF02809898