
Abstract
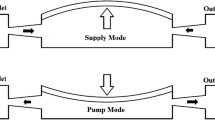
In this paper, we propose a new prototype model of a micro pump using ICPF (Ionic Conducting Polymer Film) actuator as the servo actuator. This micro pump consists of two active oneway valves that make use of the same ICPF actuator. The overall size of this micro pump prototype is 12mm in diameter and 20 mm in length. The actuating mechanism is as follows: (1) The ICPF actuator as the diaphragm is bent into anode side by application of electricity. Then the volume of the pump chamber increases, resulting in the inflow of liquid from the inlet to the chamber. (2) By changing the current direction, the volume of the pump chamber decreases, resulting in the liquid flow from the chamber to the outlet. (3) The ICPF actuator is put on a sine voltage, the micro pump provides liquid flow from the inlet to the outlet continuously. Characteristic of the micro pump is measured. The experimental results indicate that the micro pump has the satisfactory responses.
Similar content being viewed by others


References
Fukuda F, et al. In: Proc of the 1st IARP Workshop on Medical and Helthcare Robots, Ottawa, Canada, 1988. 789–792
Special session on Biorobotics. In: Proc 12th IEES/EMBS Conf, USA, 1990. 1942–1943
Umetani U. 10th ISIR Conference, 1990. 571–576
Osada Y, Hasebe M.Chem Lett, 1985. 1285–1288
Hattori S, Fukuda T, et al. Structure and mechanism of two types of micro-pump using polymer gel. In: Proceedings of IEEE Micro Electric Mechanical Systems, 1992 110–115
Oguro K, Asaka K, Takenaka H. Polymer film actutator driven by a low voltage. In: Proceedings of 4th International Symposium on Micro Machine and Human Science, 1993. 39–40
Guo S, Fukuda T, Kosuge K, et al. Micro catheter system with active guide wire. In: Proceedings 1995 IEEE International Conference on Robotic and Automation, Vol. 1, 1995. 79–84
Kanno R, Kurata A, Hattori M, et al. Characteristics and modeling of ICPF actuator—2nd Report: Frequency characteristics. In: Proceedings of JSME Annual Conference on Robotics and Mechatronics, 1994. 1206–1209
Journal of intelligent Material Systems and Structure, Technomic Publishing Co, Lancaster, 1991. 102–108
Tutorial M3, Piezoelectric Smart System, In: IEEE Int Conf on Robotics and Automation, Hyatt Regency Sacramento, 1991. 35–48
Tanaka T, Nishio I, Sun ST, et al. Collapse of gels in an electric field.Science, 1982, 128: 467–469
De Rossi D, Parrini P, Chiarelli P, et al. Electrically induced contractile phenomena in charged polymer networks: Preliminary study on the feasibility of muscle-like structure.Trans Am Soc Artif Intem Organs, 1985, 31: 60–65
Osada Y, Okuzaki H, Hori H. A polymer gel of electrically driven moiety.Nature, 1992, 355: 242–244
Guo S, Hata S, Sugimoto K, et al. Development of a new type of capsule micropump. In: Proc of 1999 IEEE International Conf on Robotics and Automation, 1999. 2171–2176
Guo S, Fukuda T, Negoro M. A new type of capsule medical micropump. In: Proc of 1999 IEEE/ASME International Conf on Advanced Intelligent Mechatronics, 1999. 55–60
Guo S, Oguro K. Microsystems for bio-medical applications (development of micro active catheter system and new type of micropumps). In: Proc of 2000 International Conf. On Information Society in the 21st Century, Emerging Technologies and New Challenges (IS2000), 2000. 314–320
Guo S, Fukuda T, Asaka K. Fish-like underwater microrobot with 3 DOF. In: Proc of 2002 IEEE International Conf. On Robotics and Automation, 2002. 738–743
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Shuxiang, G., Kinji, A. A new type of micropump driven by a low electric voltage. Acta Mech Sin 20, 146–151 (2004). https://doi.org/10.1007/BF02484258
Received:
Issue Date:
DOI: https://doi.org/10.1007/BF02484258