
Abstract
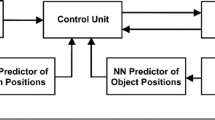
This paper describes a neural network based controller for tracking moving objects with a two-joint robot arm. The neural network consists of a single layer neural map containing pairs of cells, and two output neurons. The inputs to the network are the position of the hand, and the position and velocity of the object relative to the hand. The outputs from the network are the torques to be applied to the two joints.
The network learns the mapping between joint torques and hand movements by making random movements of the arm. During learning, the delta rule is used to adjust the weights of the connections between the neural map and the output neurons.
The model has been tested by computer simulation of a system consisting of the control network, a two joint arm with inertia and damping, and a randomly moving object. In the simulation, the neural network controller tracks objects with position and velocity errors of the order of 0.5 percent of the range of movement of the arm. This technique can be applied to a wide range of tracking control problems.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Preview
Unable to display preview. Download preview PDF.
Similar content being viewed by others


References
Werbos, P. J. (1991). An overview of neural networks for control. IEEE Control Systems Magazine, January 1991, 40–41.
Bullock, D. and Grossberg, S. (1988). Neural dynamics of planned arm movements: Emergent invariants and speed-accuracy properties during trajectory formation. Psychological Review 95, 49–90.
Gaudiano, P. and Grossberg, S. (1991). Vector associative maps: Unsupervised real-time error-based learning and control of movement trajectories. Neural Networks 4, 147–183.
Kuperstein, M. (1991). INFANT neural controller for adaptive sensory-motor coordination. Neural Networks, 4, 131–145.
Kuperstein, M. and Wang, J. (1990). Neural controller for adaptive movements with unforseen payloads. IEEE Transactions on Neural Networks, 1, 137–142.
Kawato, M., Maeda, Y., Uno, Y. and Suzuki, R. (1990). Trajectory formation of arm movement by cascade neural network model based on minimum torque change criterion. Biological Cybernetics, 62, 275–288.
Bruwer, M. and Cruse, H. (1990). A network model for the control of the movement of a redundant manipulator. Biological Cybernetics, 62, 549–555.
Miller, W. (1989). Real-time application of neural networks for sensor-based control of robots with vision. IEEE Transactions on Systems, Man and Cybernetics, 19, 825–831.
Kalveram, K. T. (1991). Pattern generating and reflex-like processes controlling aiming movements in the presence of inertia, damping and gravity. Biological Cybernetics, 64, 413–419.
Kalveram, K. T. (1991). Controlling the dynamics of a two-jointed arm by central patterning and reflex-like processing. Biological Cybernetics, 65, 65–71.
Aloimonos, J. and Tsakiris, D. (1991). Image and Vision Computing 9, 235–251.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 1992 Springer-Verlag London Limited
About this paper
Cite this paper
Shumsheruddin, D. (1992). Neural Network Control of Robot Arm Tracking Movements. In: Taylor, J.G. (eds) Neural Network Applications. Perspectives in Neural Computing. Springer, London. https://doi.org/10.1007/978-1-4471-2003-2_10
Download citation
DOI: https://doi.org/10.1007/978-1-4471-2003-2_10
Publisher Name: Springer, London
Print ISBN: 978-3-540-19772-0
Online ISBN: 978-1-4471-2003-2
eBook Packages: Springer Book Archive